





מנוע צעד היברידי Nema 14 (35 מ"מ) עם בורג כדורי, זווית צעד 1.8°, מתח 1.4 / 2.9V, זרם 1.5A, 4 חוטי לידים
מנוע צעד היברידי Nema 14 (35 מ"מ) עם בורג כדורי, זווית צעד 1.8°, מתח 1.4 / 2.9V, זרם 1.5A, 4 חוטי לידים
מנוע צעד היברידי Nema 14 (35 מ"מ), דו קוטבי, 4 מוליכים, בורג כדורי, רעש נמוך, אורך חיים ארוך, ביצועים גבוהים, בעל אישור CE ו-RoHS.
תֵאוּר
| שם המוצר | מנוע צעד היברידי בורג כדורי 35 מ"מ |
| דֶגֶם | VSM35BSHSM |
| סוּג | מנועי צעד היברידיים |
| זווית צעד | 1.8° |
| מתח (V) | 1.4 / 2.9 |
| זרם (A) | 1.5 |
| התנגדות (אוהם) | 0.95 / 1.9 |
| השראות (mH) | 1.5 / 2.3 |
| חוטי עופרת | 4 |
| אורך מנוע (מ"מ) | 34 / 45 |
| טמפרטורת הסביבה | -20℃ ~ +50℃ |
| עליית הטמפרטורה | 80 אלף מקסימום |
| חוזק דיאלקטרי | 1mA מקסימום ב-500V, 1KHz, שנייה אחת |
| התנגדות בידוד | 100MΩ מינימום @500Vdc |
הסמכות

פרמטרים חשמליים:
| גודל מנוע | מֶתַח/ שָׁלָב (ו) | נוֹכְחִי/ שָׁלָב (א) | הִתנַגְדוּת/ שָׁלָב (Ω) | הַשׁרָאוּת/ שָׁלָב (מילי-הולכי רגל) | מספר חוטי עופרת | אינרציה של הרוטור (גרם לסמ"ר2) | משקל מנוע (ז) | אורך מנוע L (מ"מ) |
| 35 | 1.4 | 1.5 | 0.95 | 1.4 | 4 | 20 | 190 | 34 |
| 35 | 2.9 | 1.5 | 1.9 | 3.2 | 4 | 30 | 230 | 47 |
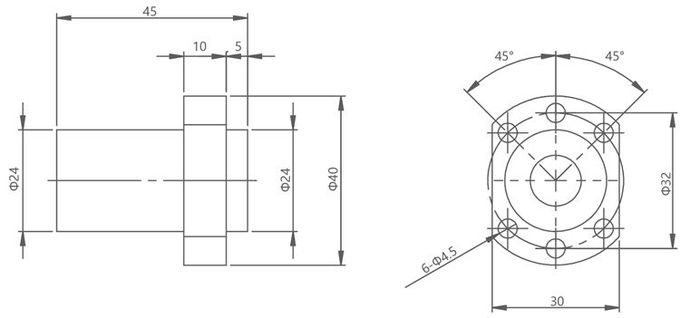
שרטוט מתאר של מנוע חיצוני סטנדרטי VSM35BSHSM
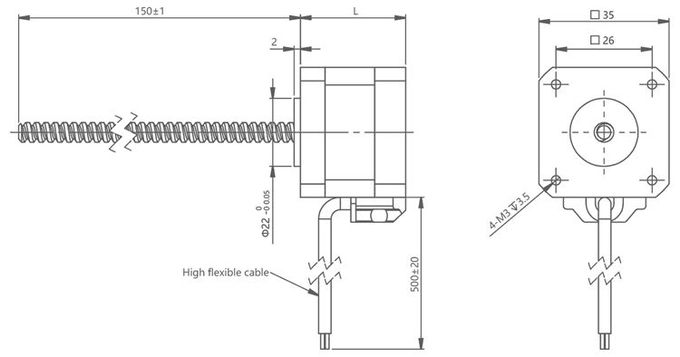
הערות:
ניתן להתאים אישית את אורך בורג ההובלה
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
אנא צרו קשר לקבלת מפרטים נוספים של בורגי כדור.
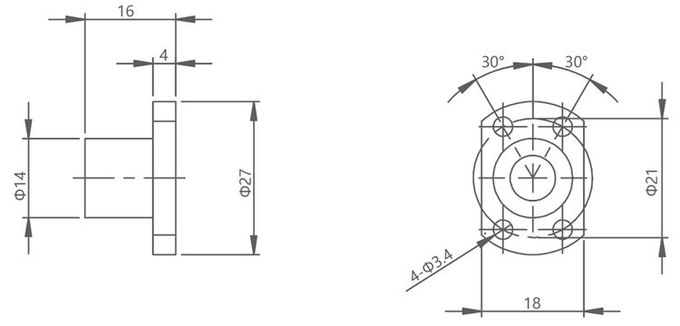
שרטוט מתאר של אום כדורי VSM35BSHSM 0801 או 0802
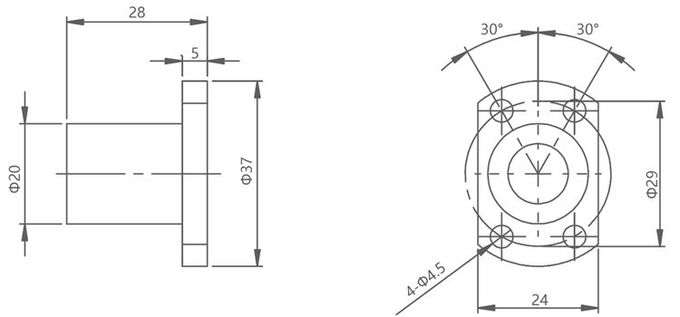
שרטוט מתאר של אום כדורי VSM35BSHSM 1202
שרטוט מתאר של אום כדורי VSM35BSHSMB 1205:
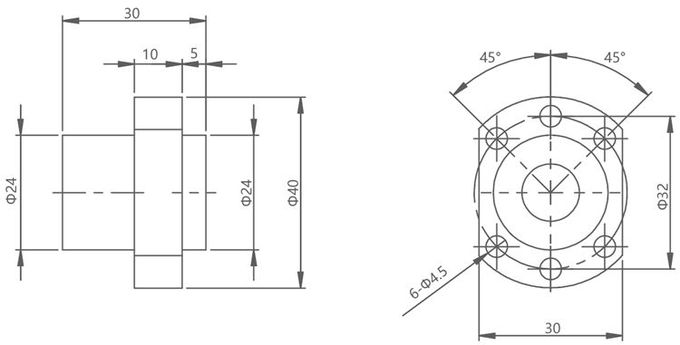
שרטוט מתאר של אום כדורי VSM35BSHSM 1210
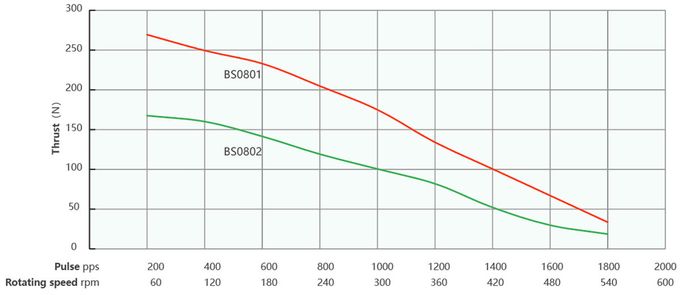
עקומת מהירות ודחף
הנעת קוצץ דו קוטבית מסדרה 35 באורך מנוע 34 מ"מ
עקומת תדר דופק ודחף של 100%
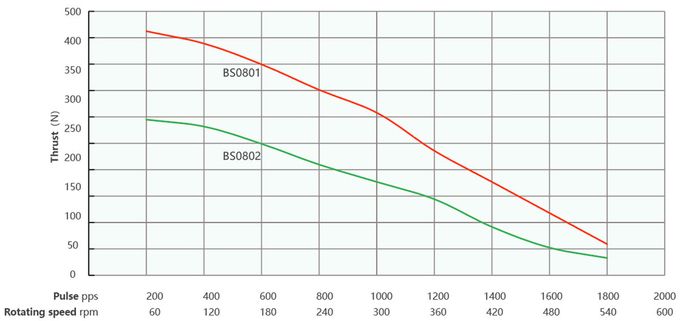
הנעת קוצץ דו קוטבית מסדרה 35 באורך מנוע 47 מ"מ
עקומת תדר דופק ודחף של 100%
| עופרת (מ"מ) | מהירות ליניארית (מ"מ/שנייה) | |||||||||
| 1 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
תנאי בדיקה:הנעת קוצץ, ללא רמפה, חצי מיקרו-צעידה, מתח הנעה 24V
תחומי יישום:
אוטומציה תעשייתית:מנועי צעד היברידיים בעלי בורג כדורי בגודל 35 מ"מ נמצאים בשימוש נרחב ביישומי אוטומציה תעשייתית. ניתן להשתמש בהם בקווי הרכבה אוטומטיים, מערכות מסועים, זרועות רובוטיות ומכונות אחרות הדורשות מיקום מדויק ובקרת תנועה אמינה.
מכונות CNC:מכונות בקרה נומרית ממוחשבת (CNC) משתמשות במנועי צעד היברידיים של 35 מ"מ עם בורג כדורי בשל דיוק גבוה. מנועים אלה ממלאים תפקיד מכריע בשליטה על תנועת כלי החיתוך, ומבטיחים חיתוכים מדויקים ותוצאות עקביות בפעולות עיבוד שונות.
הדפסה תלת-ממדית:מנועי הצעד ההיברידיים בעלי בורג כדורי בגודל 35 מ"מ מתאימים למדפסות תלת-ממד, שם הם מספקים את השליטה הדרושה לתנועת ראש ההדפסה או פלטפורמת הבנייה. המומנט והדיוק הגבוהים שלהם תורמים לשכבות מדויקות ולפרטים מורכבים באובייקטים מודפסים בתלת-ממד.
מכשירים רפואיים:בתחום הרפואי, מנועי צעד היברידיים בעלי בורג כדורי בגודל 35 מ"מ נמצאים ביישומים במגוון מכשירים רפואיים, כולל מכשירי אבחון, רובוטים כירורגיים, מחלקי תרופות אוטומטיים ומכשירים תותבים. מנועים אלה מציעים את הדיוק והאמינות הנדרשים עבור הליכים וציוד רפואיים קריטיים.
ציוד מעבדה:מכשירי מעבדה ומכשירים אנליטיים משלבים לעתים קרובות מנועי צעד היברידיים מסוג בורג כדורי בגודל 35 מ"מ למיקום מדויק ובקרת תנועה. ניתן למצוא אותם ברובוטים למעבדה, מערכות טיפול בנוזלים, מנגנוני טיפול בדגימות וציוד אחר הדורש תנועות מדויקות וחוזרות.
מערכות אופטיות:יישומי אופטיקה ופוטוניקה, כגון מערכות לייזר, מיקרוסקופיה, ספקטרוסקופיה ומערכות יישור אופטי, נהנים מהדיוק והיציבות הגבוהים המסופקים על ידי מנועי צעד היברידיים בעלי בורג כדורי בקוטר 35 מ"מ. מנועים אלה מאפשרים שליטה מדויקת ברכיבים אופטיים, תוך הבטחת מיקום ויישור מדויקים של הקרן.
אריזה ותיוג:מכונות אריזה ותיוג מסתמכות על בקרת תנועה מדויקת כדי להבטיח מיקום ויישום מדויקים של תוויות, חומרי אריזה וסגירות. הדיוק הגבוה והיכולת לחזור על עצמן של מנועי צעד היברידיים עם בורג כדורי בקוטר 35 מ"מ הופכים אותן למתאימות ליישומים כאלה, ומשפרות את יעילות האריזה ואיכות המוצר.
ציוד מוליכים למחצה:בתעשיית המוליכים למחצה, מנועי צעד היברידיים מסוג בורג כדורי בגודל 35 מ"מ משמשים במגוון ציוד, כולל מערכות טיפול בפרוסות סיליקון, כלי בדיקה ומכונות ליתוגרפיה. מנועים אלה תורמים לתנועה ויישור מדויקים הנדרשים לתהליכי ייצור מוליכים למחצה.
יִתרוֹן
דיוק מיקום גבוה:מנועי צעד היברידיים של בורג כדורי בגודל 35 מ"מ מציעים דיוק מיקום גבוה. מערכת תיבת ההילוכים של בורג הכדור מפחיתה חופש פעולה ומספקת חזרתיות מעולה, מה שמאפשר למנוע להגיע במדויק למיקום הרצוי. דיוק זה חיוני ביישומים שבהם מיקום מדויק הוא קריטי.
תפוקת מומנט מעולה:מנועים אלה מספקים תפוקת מומנט גבוהה, המאפשרת להם להניע עומסים גדולים יותר או לשמור על תנועה יציבה גם עם עומסים משתנים. מנגנון בורג הכדור ממיר ביעילות את התנועה הסיבובית של המנוע לתנועה ליניארית, וכתוצאה מכך העברת מומנט יעילה.
יעילות גבוהה:מנועי צעד ידועים בתגובתיותם וביעילותם. הם יכולים להגיב במהירות לאותות בקרה ולהשיג בקרת מיקום ותנועה מדויקים מבלי להזדקק לחיישנים או מערכות משוב נוספות. יעילות זו תורמת לביצועים הכוללים של המנוע והמערכת בה הוא משולב.
רעידות נמוכות ורעש:מנועי צעד היברידיים בעלי בורג כדורי בגודל 35 מ"מ מפגינים בדרך כלל רמות נמוכות של רעידות ורעש במהלך הפעולה. מאפיין זה חשוב במיוחד ביישומים בהם רמות רעש נמוכות רצויות או כאשר רעידות יכולות להשפיע על הביצועים או הדיוק של המערכת.
אמינות ועמידות:מנועים אלה ידועים בדרך כלל באמינותם הגבוהה ועמידותם. מערכת תיבת ההילוכים בעלת הברגה הכדורית מספקת פיזור עומס טוב וחיי שירות ארוכים, מה שמאפשר למנוע לשמור על יציבות ואמינות במהלך פעולה ממושכת ושימוש חוזר.
גודל קומפקטי:עם גורם צורה קומפקטי, ניתן לשלב בקלות מנועי צעד היברידיים בעלי בורג כדורי בקוטר 35 מ"מ ביישומים עם שטח מוגבל. הם מציעים ביצועים גבוהים ובקרה מדויקת תוך תפיסת שטח קטן יותר, מה שהופך אותם למתאימים ליישומים שבהם גודל מהווה אילוץ.
שליטה ותפעול קלים:מנועי צעד מציעים ממשק בקרה פשוט, המאפשר הפעלה ושילוב פשוטים במערכות בקרה שונות. ניתן לשלוט בהם בקלות באמצעות אותות פולסים וכיוון או אלגוריתמי בקרה מתקדמים יותר, בהתאם לדרישות היישום הספציפיות.
דרישות בחירת מנוע:
►כיוון תנועה/הרכבה
►דרישות טעינה
►דרישות שבץ
►דרישות עיבוד שבבי סופי
►דרישות דיוק
►דרישות משוב מקודד
►דרישות כוונון ידני
►דרישות סביבתיות
סדנת ייצור






