



מנוע צעד ליניארי מיקרו 36 מ"מ 12V מנוע בורג דרך ציר דחף גבוה
וִידֵאוֹ
תֵאוּר
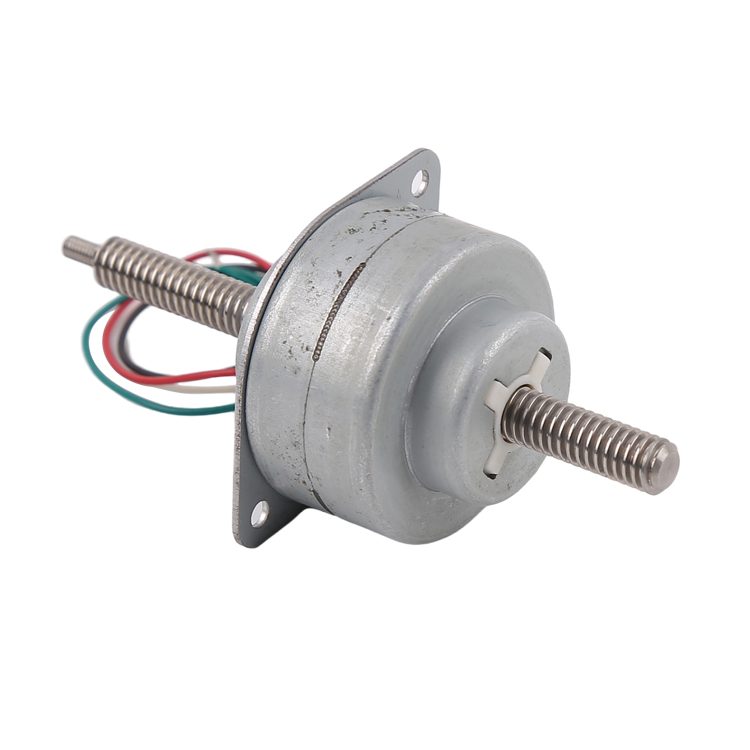
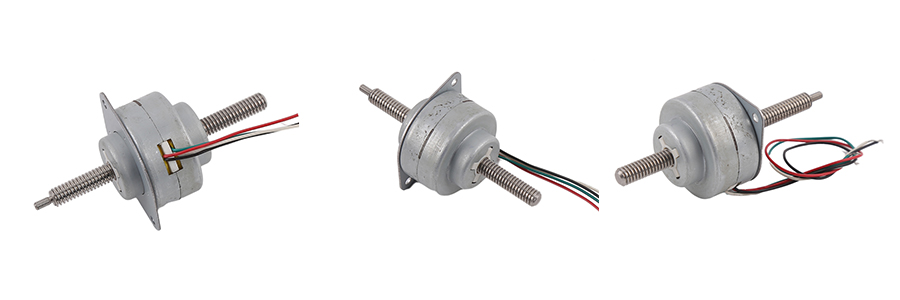
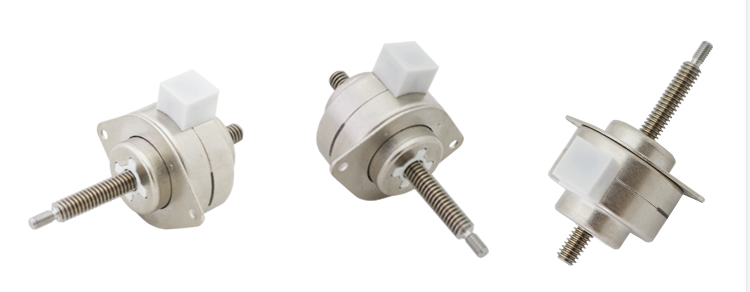
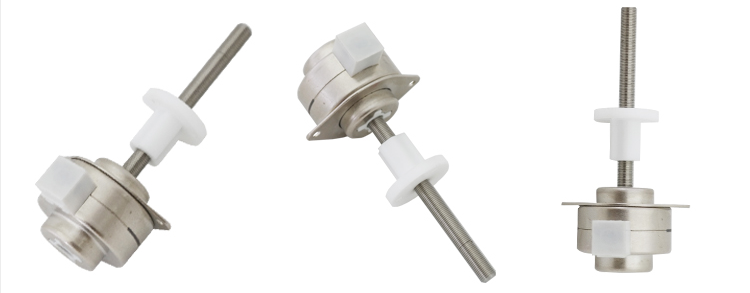
VSM36L-048S-0254-113.2 הוא מנוע צעד מסוג ציר עובר עם בורג מנחה. כאשר הרוטור פועל עם כיוון השעון או נגד כיוון השעון, יש לקבע את החלק העליון של מוט הבורג, ובורג המנחה ינוע קדימה או אחורה.
זווית הצעד של מנוע הצעד היא 7.5 מעלות, ומרווח המוליכים הוא 1.22 מ"מ. כאשר מנוע הצעד מסתובב צעד אחד, המוליך זז 0.0254 מ"מ, וניתן להתאים אישית את אורך מוט הבורג של המנוע בהתאם לצרכי הלקוח.
המוצר ממיר את סיבוב המנוע לתנועה ליניארית באמצעות התנועה היחסית של הרוטור הפנימי והבורג. הוא משמש בעיקר בבקרת שסתומים, כפתורים אוטומטיים, ציוד רפואי, מכונות טקסטיל, רובוטים ותחומים קשורים אחרים.
במקביל, ניתן לחבר או להוציא את החיווט החיצוני מתיבת השקעים בהתאם לדרישות הלקוח.
לצוות שלנו ניסיון של יותר מ-10 שנים בתכנון, פיתוח וייצור של מנועי דריכה, כך שנוכל להשיג פיתוח מוצר ותכנון עזר בהתאם לצרכים המיוחדים של הלקוחות!
פרמטרים
| שם המוצר | מנוע צעד ליניארי PM36 5v |
| דֶגֶם | VSM36L-048S-0254-113.2 |
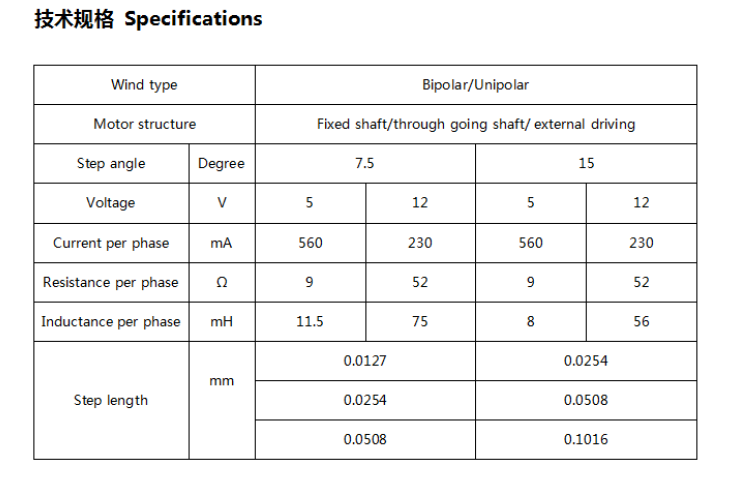
| כּוֹחַ | 5.6W |
| מֶתַח | 5V |
| זרם פאזה | 560mA |
| התנגדות פאזה | 9(土10%)אוהם / 20 מעלות צלזיוס |
| השראות פאזה | 11.5(±20%)mH I lkHz |
| זווית צעד | 7.5° |
| בורג עופרת | 1.22 |
| מסע צעדים | 0.0254 |
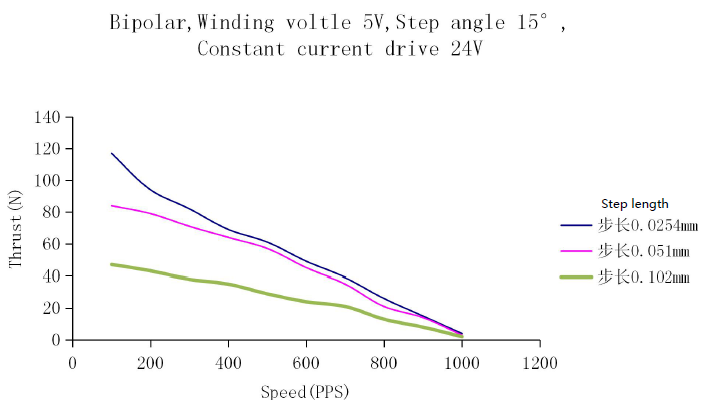
| כוח ליניארי | 70N/300PPS |
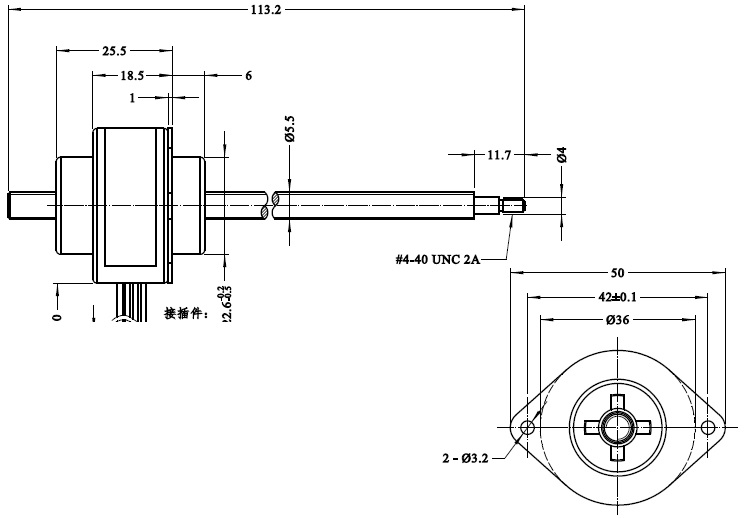
| אורך בורג | 113.2 מ"מ |
| שירות OEM ו-ODM | זָמִין |
שרטוט עיצוב
פרמטרים ומפרטים של המנוע
שָׁבוּי

לא שבוי
חִיצוֹנִי
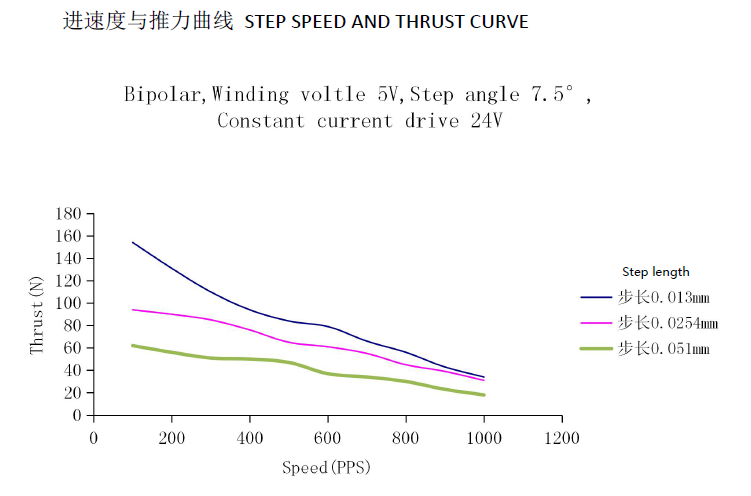
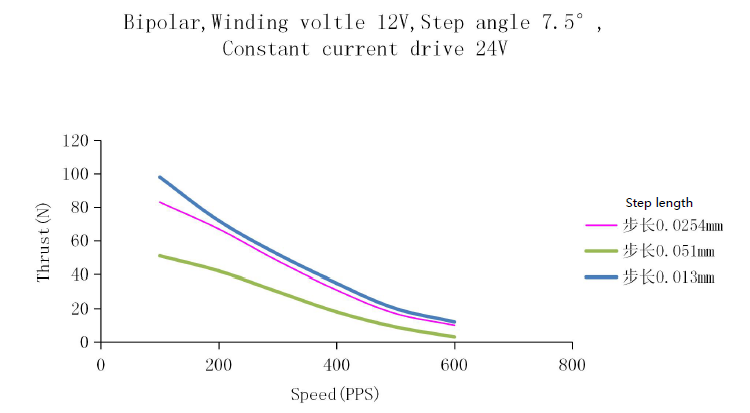
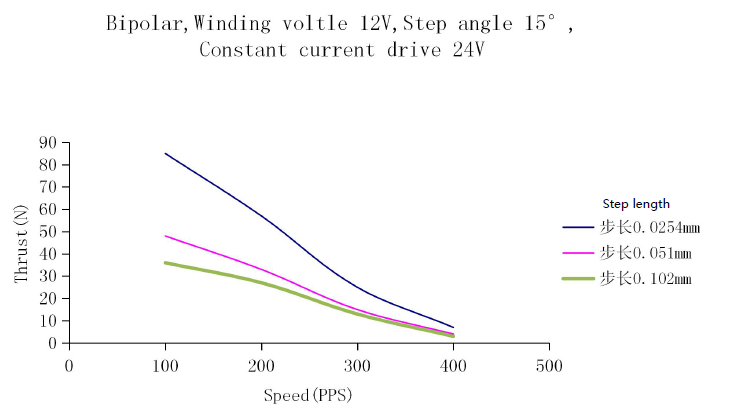
עקומת מהירות צעד ודחף
בַּקָשָׁה
שירות התאמה אישית
המנוע יכול להתאים אישית את מהלך הבורג הרגיל,
ניתן להתאים אישית מחברים וקופסאות שקעים לפי דרישות הלקוח
מוט הבורג יכול גם להתאים אישית את האום
זמן אספקה ומידע על אריזה
זמן אספקה עבור דוגמיות:
מנועים סטנדרטיים במלאי: תוך 3 ימים
מנועים סטנדרטיים שאינם במלאי: תוך 15 ימים
מוצרים מותאמים אישית: כ-25 ~ 30 ימים (בהתאם למורכבות ההתאמה האישית)
זמן אספקה לבניית תבנית חדשה: בדרך כלל כ-45 ימים
זמן אספקה לייצור המוני: בהתבסס על כמות הזמנה
אריזה:
דוגמאות ארוזות בספוג קצף עם קופסת נייר, נשלחות בדואר אקספרס
ייצור המוני, מנועים ארוזים בקרטונים גליים עם ציפוי שקוף מבחוץ. (משלוח אווירי)
אם המוצר נשלח דרך הים, הוא יארוז על משטחים

שיטת משלוח
עבור דוגמיות ומשלוח אווירי, אנו משתמשים ב-Fedex/TNT/UPS/DHL.(5~12 ימים לשירות אקספרס)
עבור משלוח ימי, אנו משתמשים בסוכן הספנות שלנו, ושולחים מנמל שנגחאי.(45 ~ 70 ימים למשלוח ימי)
שאלות נפוצות
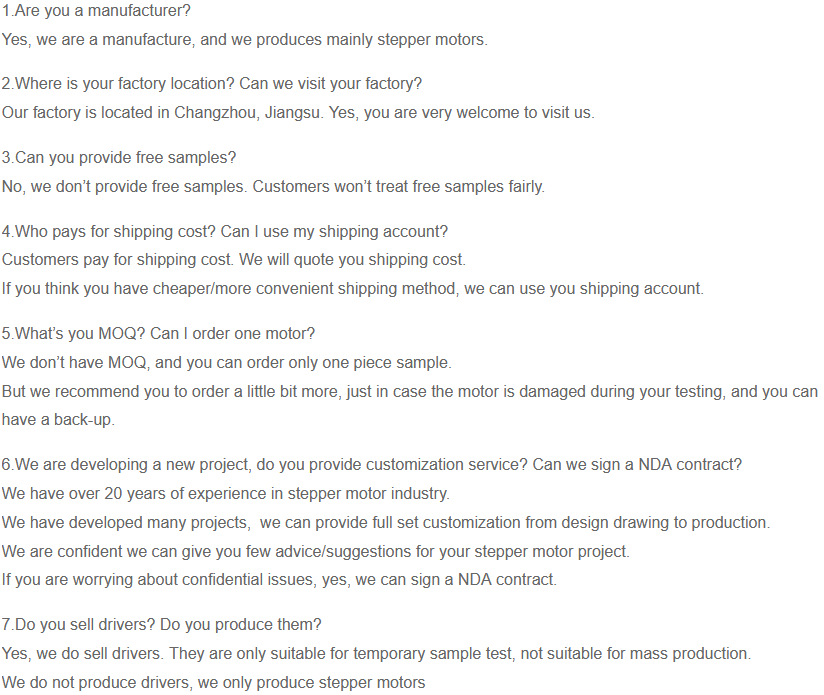
שאלות נפוצות
1. האטת אות דופק של מנוע צעד:
מהירות הסיבוב של מנוע הצעדים מבוססת על שינוי אות הפולס של הקלט. בתיאוריה, כאשר נותנים פולס לדרייבר, מנוע הצעדים מסתובב בזווית צעד (חלוקה לזווית צעד). בפועל, אם אות הפולס משתנה מהר מדי, מנוע הצעדים יסתובב עקב אפקט הריסון הפנימי של הפוטנציאל החשמלי ההפוך. התגובה המגנטית בין הרוטור לסטטור לא תעקוב אחר השינוי באות החשמלי, מה שיגרום לחסימה ואובדן צעדים.
2. מנוע צעד כיצד להשתמש בשליטה אקספוננציאלית של עקומת מהירות?
עקומת אקספוננציאלית, בתכנות תוכנה, תחילה מחושבים קבועי זמן המאוחסנים בזיכרון המחשב, והעבודה מצביעה על הבחירה. בדרך כלל, זמן התאוצה וההאטה להשלמת מנוע הצעד הוא 300ms או יותר. אם משתמשים בזמן התאוצה וההאטה קצר מדי, עבור רוב מנועי הצעד, יהיה קשה להשיג סיבוב במהירות גבוהה של מנועי הצעד.





