





מנוע צעד היברידי Nema 17 (42 מ"מ) עם בורג כדורי, זווית צעד 1.8°, מתח 2.1 / 3.7V, זרם 1A, חוט 4 מוליכים
מנוע צעד היברידי Nema 17 (42 מ"מ) עם בורג כדורי, זווית צעד 1.8°, מתח 2.1 / 3.7V, זרם 1A, חוט 4 מוליכים
מנוע צעד היברידי Nema 17 (42 מ"מ), דו קוטבי, 4 מוליכים, בורג כדורי, רעש נמוך, אורך חיים ארוך, ביצועים גבוהים, בעל אישור CE ו-RoHS.
תֵאוּר
| שם המוצר | מנוע צעד היברידי בורג כדורי 42 מ"מ |
| דֶגֶם | VSM42BSHSM |
| סוּג | מנועי צעד היברידיים |
| זווית צעד | 1.8° |
| מתח (V) | 2.6 / 3.3 / 2 / 2.5 |
| זרם (A) | 1.5 / 2.5 |
| התנגדות (אוהם) | 1.8 / 2.2 / 0.8 / 1 |
| השראות (mH) | 2.6 / 4.6 / 1.8 / 2.8 |
| חוטי עופרת | 4 |
| אורך מנוע (מ"מ) | 34 / 40 / 48 / 60 |
| טמפרטורת הסביבה | -20℃ ~ +50℃ |
| עליית הטמפרטורה | 80 אלף מקסימום |
| חוזק דיאלקטרי | 1mA מקסימום ב-500V, 1KHz, שנייה אחת |
| התנגדות בידוד | 100MΩ מינימום @500Vdc |
הסמכות

פרמטרים חשמליים:
| גודל מנוע | מֶתַח /שָׁלָב (ו) | נוֹכְחִי /שָׁלָב (א) | הִתנַגְדוּת /שָׁלָב (Ω) | הַשׁרָאוּת /שָׁלָב (מילי-הולכי רגל) | מספר חוטי עופרת | אינרציה של הרוטור (גרם לסמ"ר2) | משקל מנוע (ז) | אורך מנוע L (מ"מ) |
| 42 | 2.6 | 1.5 | 1.8 | 2.6 | 4 | 35 | 250 | 34 |
| 42 | 3.3 | 1.5 | 2.2 | 4.6 | 4 | 55 | 290 | 40 |
| 42 | 2 | 2.5 | 0.8 | 1.8 | 4 | 70 | 385 | 48 |
| גודל מנוע | מֶתַח /שָׁלָב (ו) | נוֹכְחִי /שָׁלָב (א) | הִתנַגְדוּת /שָׁלָב (Ω) | הַשׁרָאוּת /שָׁלָב (מילי-הולכי רגל) | מספר חוטי עופרת | אינרציה של הרוטור (גרם לסמ"ר2) | משקל מנוע (ז) | אורך מנוע L (מ"מ) |
| 42 | 2.6 | 1.5 | 1.8 | 2.6 | 4 | 35 | 250 | 34 |
| 42 | 3.3 | 1.5 | 2.2 | 4.6 | 4 | 55 | 290 | 40 |
| 42 | 2 | 2.5 | 0.8 | 1.8 | 4 | 70 | 385 | 48 |
| 42 | 2.5 | 2.5 | 1 | 2.8 | 4 | 105 | 450 | 60 |
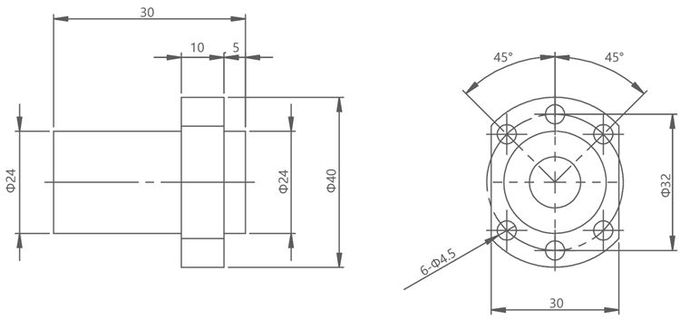
שרטוט מתאר של מנוע חיצוני סטנדרטי VSM42BSHSM:
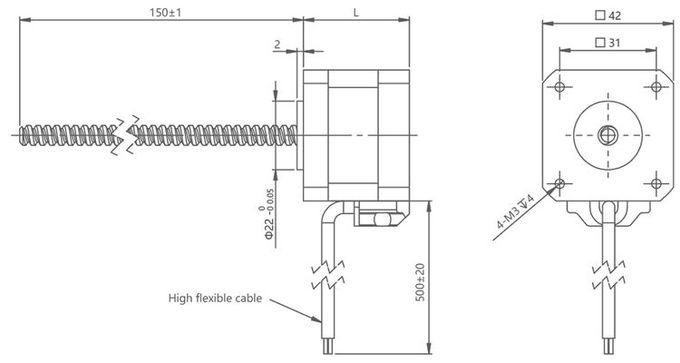
הערות:
ניתן להתאים אישית את אורך בורג ההובלה
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
אנא צרו קשר לקבלת מפרטים נוספים של בורגי כדור.
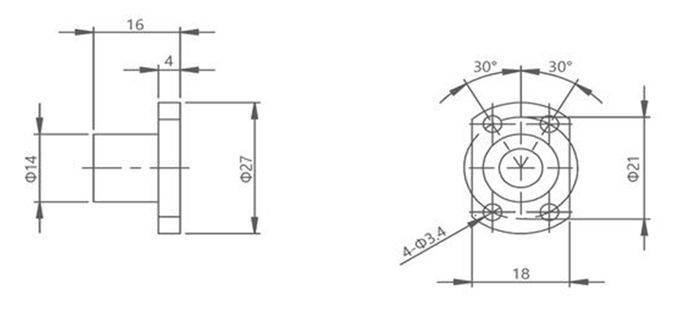
שרטוט מתאר של אום כדורי VSM42BSHSM 0801 או 0802
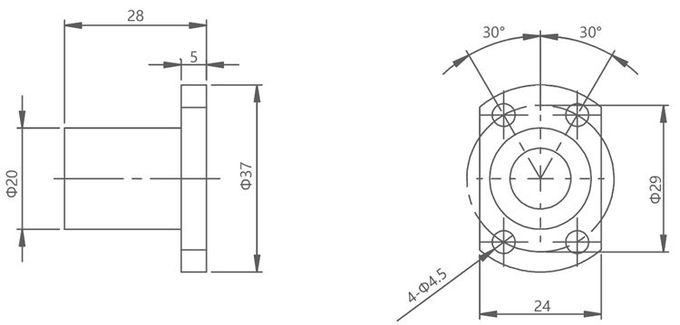
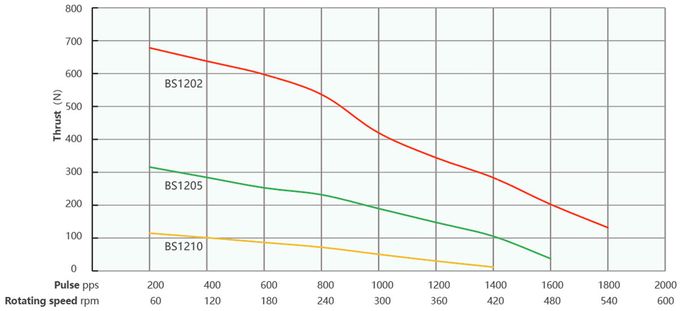
שרטוט מתאר של אום כדורי VSM42BSHSMB 1202:
שרטוט מתאר של אום כדורי VSM42BSHSMB 1205:
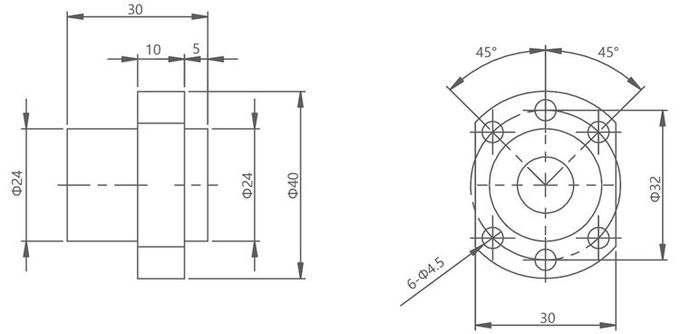
שרטוט מתאר של אום כדורי VSM42BSHSMB 1210:
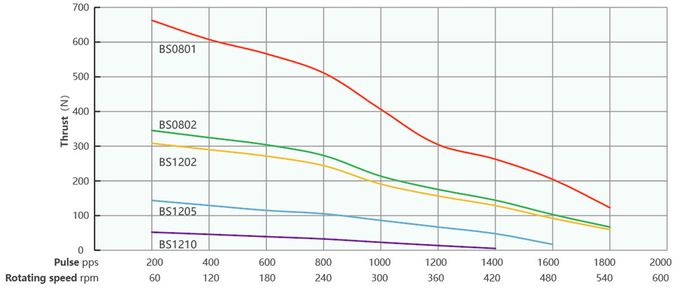
עקומת מהירות ודחף
הנעת קוצץ דו קוטבית מסדרה 42 באורך מנוע 34 מ"מ
עקומת תדר דופק ודחף של 100%
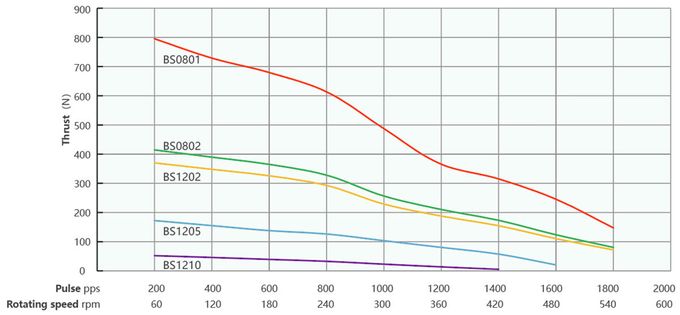
42 סדרה 40 מ"מ אורך מנוע דו קוטבי הנעה
עקומת תדר דופק ודחף של 100%
| עופרת (מ"מ) | מהירות ליניארית (מ"מ/שנייה) | |||||||||
| 1 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
תנאי בדיקה:הנעת קוצץ, ללא רמפה, חצי מיקרו-צעידה, מתח הנעה 40V
הנעת קוצץ דו קוטבית מסדרה 42 באורך מנוע 48 מ"מ
עקומת תדר דופק ודחף של 100%
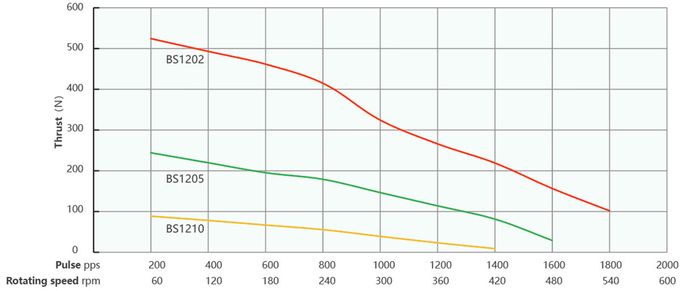
הנעת קוצץ דו קוטבית באורך מנוע 60 מ"מ מסדרה 42
עקומת תדר דופק ודחף של 100%
| עופרת (מ"מ) | מהירות ליניארית (מ"מ/שנייה) | |||||||||
| 1 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
תנאי בדיקה:הנעת קוצץ, ללא רמפה, חצי מיקרו-צעידה, מתח הנעה 40V
תחומי יישום:
ציוד אוטומציה:ניתן להשתמש במנועים אלה במגוון ציוד אוטומציה כגון קווי הרכבה אוטומטיים, מכונות אריזה, מערכות אחסון אוטומטיות ועוד. הם מספקים מיקום מדויק ובקרת תנועה אמינה לצורך מניפולציה ומיקום מדויקים של חלקי עבודה.
מדפסות תלת-ממד:ניתן להשתמש במנועי צעד היברידיים בעלי בורג כדורי בקוטר 42 מ"מ בצירים הנעים של מדפסות תלת-ממד לצורך מיקום מדויק ובקרת תנועה של ראש ההדפסה. בעזרת בקרת מיקום מדויקת, ניתן להשיג תוצאות הדפסה באיכות גבוהה.
כלי עבודה של מכונות CNC:ניתן להשתמש במנועים אלה בצירי תנועה של מכונות CNC כגון שולחנות מיקום XYZ, מכונות כרסום ומכונות חריטה. הם מספקים דיוק גבוה, תפוקת מומנט גבוהה ובקרת תנועה אמינה לעיבוד שבבי וחריטה מדויקים.
ציוד רפואי:מנועי צעד היברידיים מסוג בורג כדורי 42 מ"מ ניתנים לשימוש בציוד רפואי כגון ציוד הדמיה רפואית, רובוטים כירורגיים ומכשירים רפואיים אוטומטיים. הם מספקים בקרת מיקום מדויקת ותנועה יציבה למניפולציה עדינה ואוטומציה של תהליכים רפואיים.
מכונות טקסטיל:מנועים אלה יכולים לשמש עבור צירי תנועה שונים במכונות טקסטיל, כגון נולים, מכונות תפירה, מכונות רקמה ועוד. הם מאפשרים תנועות במהירות גבוהה ובדיוק גבוה לייצור ועיבוד טקסטיל.
רובוטיקה:מנועי צעד היברידיים בעלי בורג כדורי בקוטר 42 מ"מ משמשים במפרקים ובמפעילים ברובוטים. הם מספקים בקרת מיקום מדויקת ופלט מומנט גבוה ומשמשים למימוש תנועה ותפעול מדויקים של רובוטים.
יִתרוֹן
דיוק מיקום גבוה:מנועי צעד היברידיים של בורג כדורי בגודל 42 מ"מ מציעים דיוק מיקום גבוה. מערכת תיבת ההילוכים של בורג הכדור מפחיתה את החופש ההפוך, וכתוצאה מכך דיוק וחזרתיות משופרים. זה מאפשר למנוע להגיע ולשמור במדויק על המיקום הרצוי, דבר חיוני ביישומים הדורשים מיקום מדויק.
תפוקת מומנט מוגברת:מנועים אלה מספקים תפוקת מומנט מוגברת בהשוואה למנועי צעד סטנדרטיים. מנגנון בורג הכדורים ממיר ביעילות את התנועה הסיבובית של המנוע לתנועה ליניארית, וכתוצאה מכך העברת מומנט משופרת. זה מאפשר למנוע להניע עומסים גדולים יותר או להתגבר על התנגדות גבוהה יותר, מה שהופך אותו למתאים ליישומים עם דרישות מומנט תובעניות.
קיבולת עומס משופרת:מערכת תיבת ההילוכים של בורג הכדור במנועים אלה מספקת כושר נשיאה משופר. התכנון מפזר את העומס לאורך הבורג, ומאפשר למנוע להתמודד עם עומסים גבוהים יותר ולשמור על יציבות במהלך הפעולה. זה הופך אותם למתאימים ליישומים הכוללים הזזת עומסים כבדים או עבודה בסביבות מאתגרות.
תגובה מופחתת:מרווח תנועה מתייחס למרווח או למרחק בין הבורג לאום במערכת תמסורת. מנגנון בורג הכדור המשמש במנועים אלה מסייע במזעור מרווח התנועה, וכתוצאה מכך בקרת תנועה ודיוק מיקום משופרים. מרווח התנועה המופחת מבטיח שהמנוע יגיב במדויק לאותות בקרה, מה שהופך אותו למתאים ליישומים הדורשים שליטה הדוקה בתנועה.
יעילות גבוהה יותר:מנועי צעד היברידיים מסוג בורג כדורי מציעים יעילות גבוהה יותר בהשוואה למנועי צעד מסורתיים. מערכת תיבת ההילוכים של בורג הכדורים מפחיתה את החיכוך, וכתוצאה מכך שיפור בהמרת אנרגיה והפחתת הפסדי הספק. משמעות הדבר היא יעילות כוללת משופרת וצריכת חשמל נמוכה יותר, מה שהופך אותם לחסכוניים וידידותיים יותר לסביבה.
פעולה חלקה:מנגנון בורג הכדור מספק תנועה ליניארית חלקה ומדויקת יותר בהשוואה למערכות תמסורת אחרות. פעולה חלקה זו מפחיתה את רמות הרעידות והרעש במהלך פעולת המנוע, ומבטיחה ביצועים שקטים ויציבים יותר. כתוצאה מכך, מנועים אלה מתאימים ליישומים בהם יש צורך למזער רעש ורעידות.
אורך חיים ואמינות:מנועי צעד היברידיים בעלי בורג כדורי בקוטר 42 מ"מ מתוכננים לעמידות וחיי שירות ארוכים. מנגנון הבורג הכדורי, בשילוב עם רכיבים איכותיים, מבטיח ביצועים אמינים ועקביים גם בתנאי הפעלה תובעניים. התוצאה היא דרישות תחזוקה מופחתות ושיפור אמינות המערכת.
דרישות בחירת מנוע:
►כיוון תנועה/הרכבה
►דרישות טעינה
►דרישות שבץ
►דרישות עיבוד שבבי סופי
►דרישות דיוק
►דרישות משוב מקודד
►דרישות כוונון ידני
►דרישות סביבתיות
סדנת ייצור






