.jpg)
.jpg)
.jpg)
.jpg)
מנוע צעד היברידי Nema 17 (42 מ"מ), דו קוטבי, 4 מוליכים, בורג מוליך ACME, זווית צעד 1.8°, חיים ארוכים, ביצועים גבוהים.
מנוע צעד היברידי Nema 17 (42 מ"מ), דו קוטבי, 4 מוליכים, בורג מוליך ACME, זווית צעד 1.8°, חיים ארוכים, ביצועים גבוהים.
מנוע צעד היברידי 42 מ"מ זה זמין בשלושה סוגים: בעל הנעה חיצונית, ציר דרך וציר קבוע דרך. ניתן לבחור בהתאם לצרכים הספציפיים שלכם.
תיאורים
| שם המוצר | מנועי צעד היברידיים 42 מ"מ |
| דֶגֶם | VSM42HSM |
| סוּג | מנועי צעד היברידיים |
| זווית צעד | 1.8° |
| מתח (V) | 2/2.6/3.3 |
| זרם (A) | 1.5/2.5 |
| התנגדות (אוהם) | 0.8/1.8/2.2 |
| השראות (mH) | 1.8/2.8/4.6 |
| חוטי עופרת | 4 |
| אורך מנוע (מ"מ) | 34/48/46 |
| טמפרטורת הסביבה | -20℃ ~ +50℃ |
| עליית הטמפרטורה | 80 אלף מקסימום |
| חוזק דיאלקטרי | 1mA מקסימום ב-500V, 1KHz, שנייה אחת |
| התנגדות בידוד | 100MΩ מינימום @500Vdc |
הסמכות

פרמטרים חשמליים:
| גודל מנוע | מֶתַח /שָׁלָב (ו) | נוֹכְחִי /שָׁלָב (א) | הִתנַגְדוּת /שָׁלָב (Ω) | הַשׁרָאוּת /שָׁלָב (מילי-הולכי רגל) | מספר חוטי עופרת | אינרציה של הרוטור (גרם לסמ"ר2) | משקל מנוע (ז) | אורך מנוע L (מ"מ) |
| 42 | 2.6 | 1.5 | 1.8 | 2.6 | 4 | 35 | 250 | 34 |
| 42 | 3.3 | 1.5 | 2.2 | 4.6 | 4 | 55 | 290 | 40 |
| 42 | 2 | 2.5 | 0.8 | 1.8 | 4 | 70 | 385 | 48 |
| 42 | 2.5 | 2.5 | 1 | 2.8 | 4 | 105 | 450 | 60 |
מפרט בורג עופרת ופרמטרי ביצועים
| קוֹטֶר (מ"מ) | עוֹפֶרֶת (מ"מ) | שָׁלָב (מ"מ) | כוח נעילה עצמית לכבות (נ) |
| 6.35 | 1.27 | 0.00635 | 150 |
| 6.35 | 3.175 | 0.015875 | 40 |
| 6.35 | 6.35 | 0.03175 | 15 |
| 6.35 | 12.7 | 0.0635 | 3 |
| 6.35 | 25.4 | 0.127 | 0 |
הערה: לקבלת מפרטים נוספים של בורגי מוביל, אנא צרו קשר.
שרטוט מתאר של מנוע חיצוני סטנדרטי VSM42HSM:
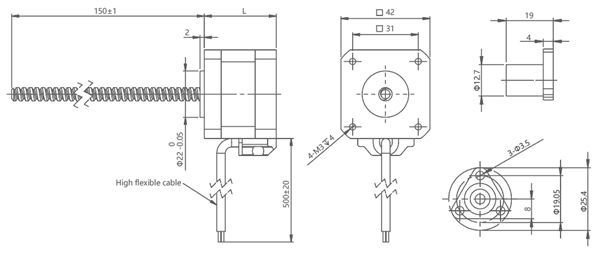
הערות:
ניתן להתאים אישית את אורך בורג ההובלה
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
שרטוט מתאר של מנועי צעד היברידיים 42 מ"מ של מנוע שבוי סטנדרטי
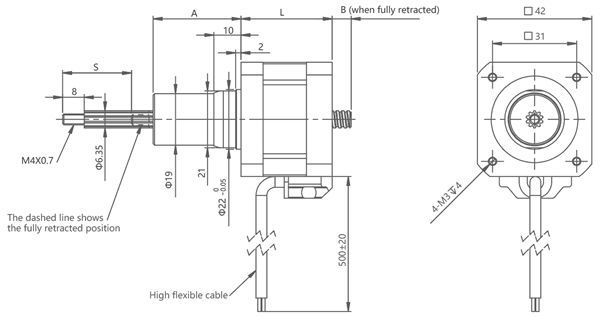
הערות:
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
| שבץ S (מ"מ) | ממד א' (מ"מ) | מידה B (מ"מ) | |||
| ל = 34 | ל = 40 | ל = 48 | ל = 60 | ||
| 12.7 | 20.6 | 6.4 | 0.4 | 0 | 0 |
| 19.1 | 27 | 12.8 | 6.8 | 0 | 0 |
| 25.4 | 33.3 | 19.1 | 13.1 | 5.1 | 0 |
| 31.8 | 39.7 | 25.5 | 19.5 | 11.5 | 0 |
| 38.1 | 46 | 31.8 | 25.8 | 17.8 | 5.8 |
| 50.8 | 58.7 | 44.5 | 38.5 | 30.5 | 18.5 |
| 63.5 | 71.4 | 57.2 | 51.2 | 43.2 | 31.2 |
שרטוט מתאר של מנוע צעד היברידי סטנדרטי עם מנוע קבוע דרך 42 מ"מ
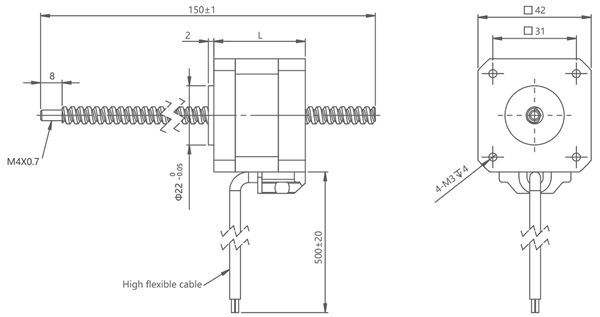
הערות:
ניתן להתאים אישית את אורך בורג ההובלה
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
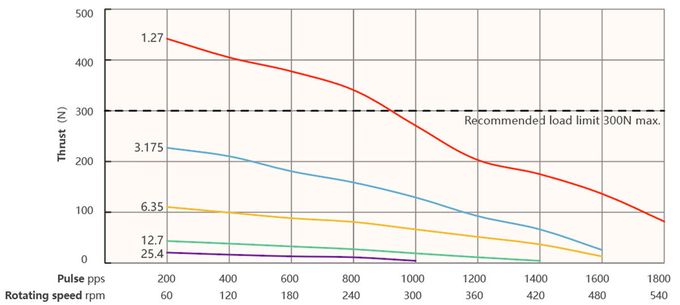
עקומת מהירות ודחף:
הנעת קוצץ דו קוטבית מסדרה 42 באורך מנוע 34 מ"מ
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ6.35 מ"מ)
42 סדרה 40 מ"מ אורך מנוע דו קוטבי הנעה
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ6.35 מ"מ)
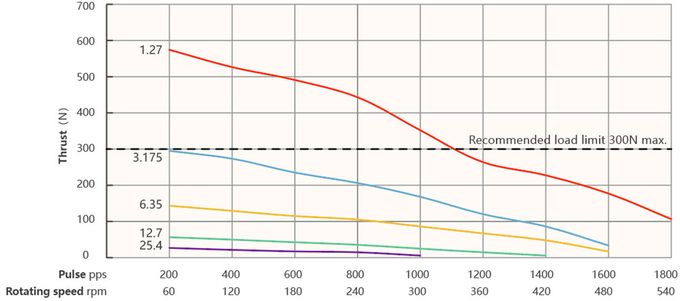
| עופרת (מ"מ) | מהירות ליניארית (מ"מ/שנייה) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 3.175 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 |
| 6.35 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 |
| 12.7 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 177.8 | 203.2 | 228.6 |
תנאי בדיקה:
הנעת קוצץ, ללא רמפה, חצי מיקרו-צעידה, מתח הנעה 40V
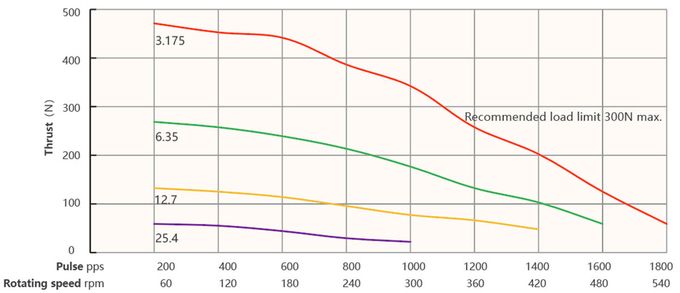
הנעת קוצץ דו קוטבית מסדרה 42 באורך מנוע 48 מ"מ
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ6.35 מ"מ)
הנעת קוצץ דו קוטבית באורך מנוע 60 מ"מ מסדרה 42
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ6.35 מ"מ)
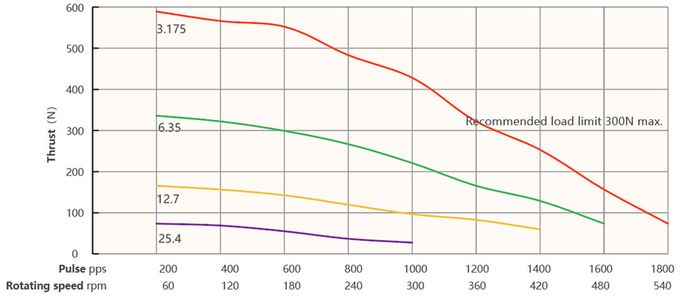
| עופרת (מ"מ) | מהירות ליניארית (מ"מ/שנייה) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 3.175 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 |
| 6.35 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 |
| 12.7 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 177.8 | 203.2 | 228.6 |
תנאי בדיקה:
הנעת קוצץ, ללא רמפה, חצי מיקרו-צעידה, מתח הנעה 40V
תחומי יישום
ציוד אוטומציה:מנועי צעד היברידיים בגודל 42 מ"מ נמצאים בשימוש נרחב במגוון ציוד אוטומציה, כולל מכונות אריזה אוטומטיות, קווי ייצור אוטומטיים, כלי עבודה וציוד הדפסה. הם מספקים בקרת מיקום מדויקת ופלט מומנט גבוה כדי לעמוד בדרישות של ציוד אוטומציה לתנועה מדויקת ואמינות.
מדפסות תלת-ממד:למנועי צעד היברידיים בגודל 42 מ"מ ממלאים תפקיד מפתח במדפסות תלת-ממד. הם משמשים להנעת ראש ההדפסה לבקרת מיקום מדויקת ביותר ולמימוש פעולות הדפסה מדויקות. מנועים אלה מציעים דיוק ואמינות מיקום טובים, מה שעוזר לשפר את הביצועים ואיכות ההדפסה של מדפסות תלת-ממד.
מכשירים רפואיים:מנועי צעד היברידיים בקוטר 42 מ"מ נמצאים בשימוש נרחב במכשירים רפואיים. לדוגמה, בציוד הדמיה רפואית (למשל, סורקי CT, מכשירי רנטגן), מנועים אלה משמשים לשליטה בפלטפורמות מסתובבות ובחלקים נעים. בנוסף, הם משמשים לבקרת מיקום מדויקת במכשירים רפואיים כגון רובוטים כירורגיים, מזרקים ועיבוד דגימות אוטומטי.
רובוטיקה:מנועי צעד היברידיים בקוטר 42 מ"מ ממלאים תפקיד חשוב ברובוטיקה. ניתן להשתמש בהם להנעת מפרקי רובוטים, ומספקים בקרת מיקום ופלט מומנט מדויקים. יישומי רובוטיקה כוללים רובוטים תעשייתיים, רובוטי שירות ורובוטים רפואיים.
רכב:למנועי צעד היברידיים בגודל 42 מ"מ יש יישומים בציוד רכב. הם משמשים במערכות בקרה שונות בתוך כלי רכב, כגון כוונון מושבים, הרמה והורדה של חלונות וכוונון מראות אחוריות. מנועים אלה מספקים בקרת מיקום מדויקת ביותר וביצועים אמינים כדי להבטיח פעולה תקינה של ציוד רכב.
בית חכם ואלקטרוניקה צרכנית:מנועי צעד היברידיים בגודל 42 מ"מ משמשים במכשירי בית חכם ובאלקטרוניקה צרכנית. ניתן להשתמש בהם במכשירים כגון מנעולי דלת חכמים, ראשי מצלמה, וילונות חכמים, שואבי אבק רובוטיים וכו' כדי לספק בקרת מיקום ופונקציות תנועה מדויקות.
בנוסף ליישומים הנ"ל, ניתן להשתמש במנועי צעד היברידיים של 42 מ"מ גם בציוד טקסטיל, מערכות ניטור אבטחה, בקרת תאורת במה ותחומים אחרים הדורשים בקרת מיקום מדויקת וביצועים אמינים. בסך הכל, למנועי צעד היברידיים של 42 מ"מ יש מגוון רחב של יישומים בתעשיות מרובות.
יִתרוֹן
מומנט במהירויות נמוכות:מנועי צעד היברידיים בגודל 42 מ"מ מציגים ביצועי מומנט מצוינים במהירויות נמוכות. הם יכולים לייצר מומנט החזקה גבוה, מה שמאפשר להם להתחיל ולפעול בצורה חלקה גם במהירויות נמוכות מאוד. מאפיין זה הופך אותם למתאימים ליישומים הדורשים בקרה מדויקת ותנועות איטיות, כגון רובוטיקה, ציוד אוטומציה ומכשירים רפואיים.
דיוק מיקום:מנועים אלה מציעים דיוק מיקום גבוה. הודות לרזולוציית הצעדים העדינה שלהם, הם יכולים להשיג מיקום מדויק ובקרת תנועה מדויקת. זה קריטי ביישומים הדורשים מיקום מדויק, כגון מכונות CNC, מדפסות תלת מימד ומערכות פיק-אנד-פלייס.
יכולת נעילה עצמית:למנועי צעד היברידיים יש יכולת נעילה עצמית כאשר הסלילים אינם מופעלים. משמעות הדבר היא שהם יכולים לשמור על מיקומם ללא צריכת חשמל, וזה יתרון ביישומים בהם נדרשת החזקת מיקום ללא חשמל, כגון בזרועות רובוטיות או בממקמים.
חסכוני:מנועי צעד היברידיים בגודל 42 מ"מ מספקים פתרון חסכוני עבור יישומים רבים. בהשוואה לסוגים אחרים של מנועים, כגון מנועי סרוו, הם בדרך כלל זולים יותר. בנוסף, פשטות מערכת הבקרה שלהם והיעדר חיישני משוב תורמים ליעילותם הכספית.
טווח רחב של מהירויות פעולה:מנועים אלה יכולים לפעול במגוון רחב של מהירויות, החל ממהירויות נמוכות מאוד ועד למהירויות גבוהות יחסית. הם מציעים בקרת מהירות טובה ויכולים להשיג האצה והאטה חלקות. גמישות זו בבקרת המהירות הופכת אותם למתאימים ליישומים עם דרישות מהירות משתנות.
גודל קומפקטי:גודל מנוע הצעדים בגודל 42 מ"מ מייצג גודל קומפקטי יחסית. זה מקל על שילובו ביישומים מוגבלים במקום או בציוד הדורש עיצובים קומפקטיים וקלים.
אמינות ואריכות ימים:מנועי צעד היברידיים ידועים באמינותם ועמידותם. הם מתוכננים לפעול ברציפות למשך תקופות ארוכות, עם דרישות תחזוקה מינימליות.
דרישות בחירת מנוע:
►כיוון תנועה/הרכבה
►דרישות טעינה
►דרישות שבץ
►דרישות עיבוד שבבי סופי
►דרישות דיוק
►דרישות משוב מקודד
►דרישות כוונון ידני
►דרישות סביבתיות
סדנת ייצור


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)