.jpg)
.jpg)
.jpg)
.jpg)
מנוע צעד היברידי Nema 23 (57 מ"מ), דו קוטבי, 4 מוליכים, בורג מוליך ACME, רעש נמוך, חיים ארוכים, ביצועים גבוהים.
מנוע צעד היברידי Nema 23 (57 מ"מ), דו קוטבי, 4 מוליכים, בורג מוליך ACME, רעש נמוך, חיים ארוכים, ביצועים גבוהים.
מנוע צעד היברידי 57 מ"מ זה זמין בשלושה סוגים: בעל הנעה חיצונית, ציר דרך וציר קבוע דרך. ניתן לבחור בהתאם לצרכים הספציפיים שלכם.
מנוע זה זמין בגדלים 20 מ"מ, 28 מ"מ, 35 מ"מ, 42 מ"מ, 57 מ"מ, 86 מ"מ
אורך צעד, 0.001524 מ"מ ~ 0.127 מ"מ
ביצועים דחף מרבי עד 240 ק"ג, עליית טמפרטורה נמוכה, רעידות נמוכות, רעש נמוך, אורך חיים ארוך (עד 5 מיליון מחזורים), דיוק מיקום גבוה (עד ±0.01 מ"מ)
תיאורים
| שם המוצר | מנועי צעד היברידיים 57 מ"מ |
| דֶגֶם | VSM57HSM |
| סוּג | מנועי צעד היברידיים |
| זווית צעד | 1.8° |
| מתח (V) | 2.3 / 3 / 3.1 / 3.8 |
| זרם (A) | 3/4 |
| התנגדות (אוהם) | 0.75 / 1 / 0.78 / 0.95 |
| השראות (mH) | 2.5 / 4.5 / 3.3 / 4.5 |
| חוטי עופרת | 4 |
| אורך מנוע (מ"מ) | 45 / 55 / 65 / 75 |
| טמפרטורת הסביבה | -20℃ ~ +50℃ |
| עליית הטמפרטורה | 80 אלף מקסימום |
| חוזק דיאלקטרי | 1mA מקסימום ב-500V, 1KHz, שנייה אחת |
| התנגדות בידוד | 100MΩ מינימום @500Vdc |
הסמכות

פרמטרים חשמליים:
| גודל מנוע | מֶתַח /שָׁלָב (ו) | נוֹכְחִי /שָׁלָב (א) | הִתנַגְדוּת /שָׁלָב (Ω) | הַשׁרָאוּת /שָׁלָב (מילי-הולכי רגל) | מספר חוטי עופרת | אינרציה של הרוטור (גרם לסמ"ר2) | משקל מנוע (ז) | אורך מנוע L (מ"מ) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
מפרט בורג עופרת ופרמטרי ביצועים
| קוֹטֶר (מ"מ) | עוֹפֶרֶת (מ"מ) | שָׁלָב (מ"מ) | כוח נעילה עצמית לכבות (נ) |
| 9.525 | 1.27 | 0.00635 | 800 |
| 9.525 | 2.54 | 0.0127 | 300 |
| 9.525 | 5.08 | 0.0254 | 90 |
| 9.525 | 10.16 | 0.0508 | 30 |
| 9.525 | 25.4 | 0.127 | 6 |
הערה: לקבלת מפרטים נוספים של בורגי מוביל, אנא צרו קשר.
שרטוט מתאר של מנוע חיצוני סטנדרטי VSM57HSM:
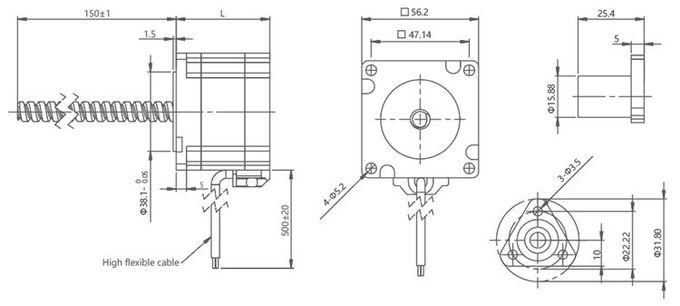
הערות:
ניתן להתאים אישית את אורך בורג ההובלה
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
שרטוט מתאר של מנועי צעד היברידיים 57 מ"מ של מנוע שבוי סטנדרטי:
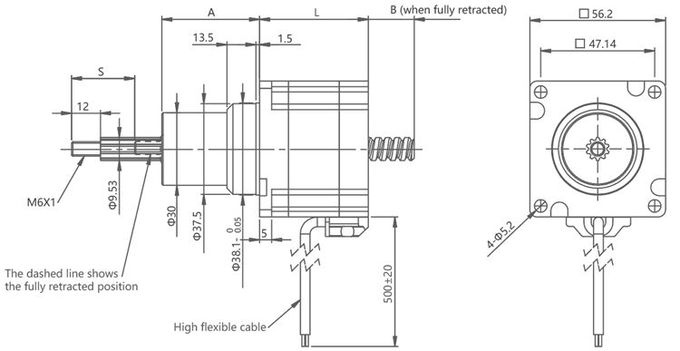
הערות:
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
| שבץ S (מ"מ) | ממד א' (מ"מ) | מידה B (מ"מ) | |||
| ל = 45 | ל = 55 | ל = 65 | ל = 75 | ||
| 12.7 | 24.1 | 1.1 | 0 | 0 | 0 |
| 19.1 | 30.5 | 7.5 | 0 | 0 | 0 |
| 25.4 | 36.8 | 13.8 | 4.8 | 0 | 0 |
| 31.8 | 43.2 | 20.2 | 11.2 | 0.2 | 0 |
| 38.1 | 49.5 | 26.5 | 17.5 | 6.5 | 0 |
| 50.8 | 62.2 | 39.2 | 30.2 | 19.2 | 9.1 |
| 63.5 | 74.9 | 51.9 | 42.9 | 31.9 | 21.9 |
שרטוט מתאר של מנוע צעד היברידי סטנדרטי עם מנוע קבוע דרך 57 מ"מ
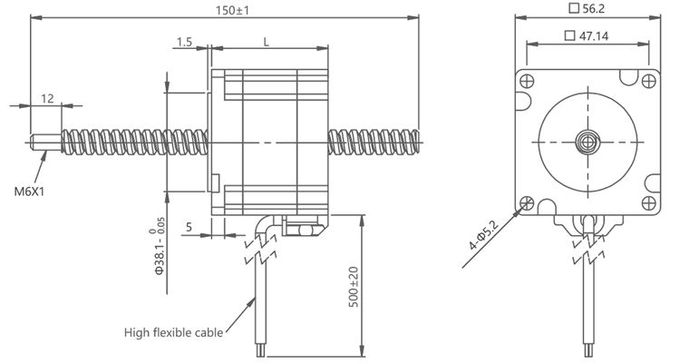
הערות:
ניתן להתאים אישית את אורך בורג ההובלה
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
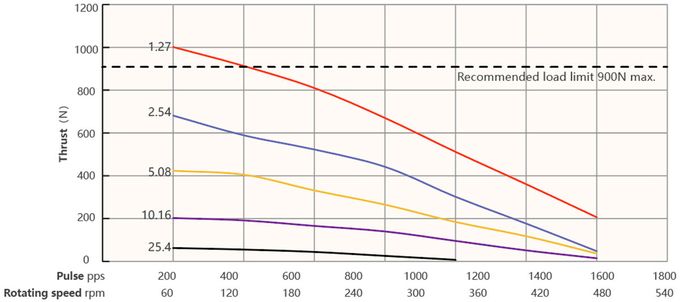
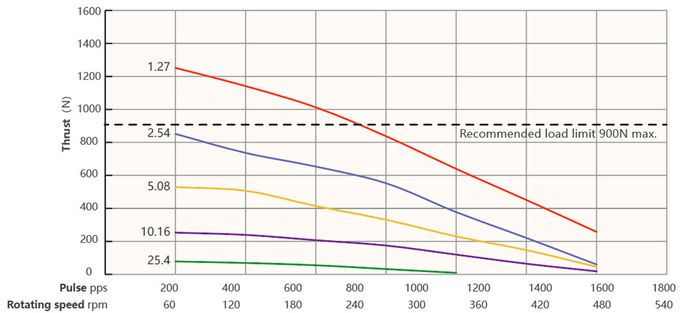
עקומת מהירות ודחף:
57 סדרה 45 מ"מ אורך מנוע דו קוטבי הנעה
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ9.525 מ"מ)
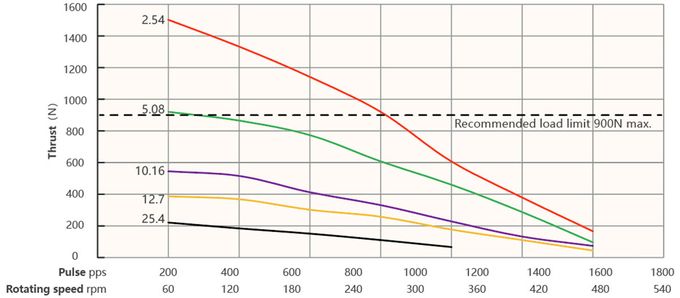
57 סדרה 55 מ"מ אורך מנוע דו קוטבי הנעה
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ9.525 מ"מ)
| עופרת (מ"מ) | מהירות ליניארית (מ"מ/שנייה) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
תנאי בדיקה:
הנעת קוצץ, ללא רמפה, חצי מיקרו-צעידה, מתח הנעה 40V
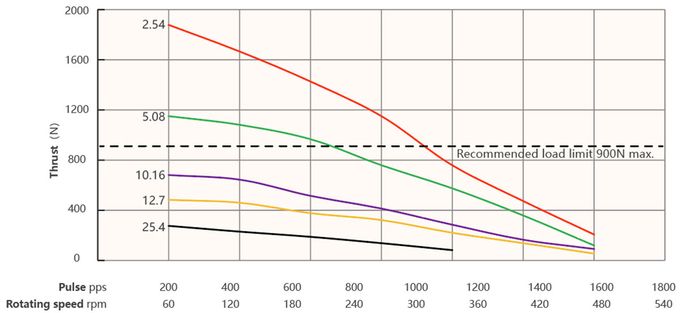
57 סדרה 65 מ"מ אורך מנוע דו קוטבי הנעה
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ9.525 מ"מ)
הנעת קוצץ דו קוטבית באורך מנוע 75 מ"מ מסדרה 57
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ9.525 מ"מ)
| עופרת (מ"מ) | מהירות ליניארית (מ"מ/שנייה) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
תנאי בדיקה:
הנעת קוצץ, ללא רמפה, חצי מיקרו-צעידה, מתח הנעה 40V
תחומי יישום
הדפסה תלת-ממדית:מנועי צעד היברידיים בגודל 57 מ"מ נמצאים בשימוש נרחב במדפסות תלת מימד כדי לשלוט במיקום ובתנועה של ראש ההדפסה.
כלי עבודה של מכונות CNC:במכונות CNC (בקרה נומרית ממוחשבת), מנועי צעד היברידיים של 57 מ"מ משמשים לשליטה בתנועת כלי חיתוך לפעולות עיבוד שבבי מדויקות.
ציוד אוטומציה:ניתן להשתמש במנועי צעד היברידיים של 57 מ"מ במגוון ציוד אוטומציה, כגון מכונות אריזה אוטומטיות, מערכות מיון אוטומטיות, קווי הרכבה אוטומטיים וכו', לשליטה בתנועה ובמיקום.
מכונות טקסטיל:בתעשיית הטקסטיל, ניתן להשתמש במנועי צעד היברידיים של 57 מ"מ כדי לשלוט במכונות טוויה, נולים וציוד אחר כדי להבטיח את הדיוק והיציבות של תהליך הטקסטיל.
ציוד רפואי:מנועי צעד היברידיים בגודל 57 מ"מ נמצאים בשימוש נרחב בציוד רפואי כגון משאבות מזרקים רפואיות, רובוטים רפואיים, ציוד סריקת תמונות וכו' לבקרת מיקום ובקרת תנועה מדויקת.
רובוטיקה:מנועי צעד היברידיים בגודל 57 מ"מ משמשים במגוון יישומי רובוטיקה, כולל רובוטים תעשייתיים, רובוטי שירות, רובוטים שיתופיים וכו', לתנועה ומניפולציה מדויקות.
מערכות אחסון אוטומטיות:במערכות אוטומטיות של אחסון ולוגיסטיקה, ניתן להשתמש במנועי צעד היברידיים של 57 מ"מ כדי לשלוט במסועים, מעליות, מנופי ערימה וציוד אחר כדי להשיג מיקום וטיפול מדויקים בפריטים.
אלו הן רק חלק מהיישומים האופייניים של מנועי צעד היברידיים בגודל 57 מ"מ, ולמעשה, הם נמצאים בשימוש נרחב בתחומים רבים אחרים, כולל ציוד הדפסה, מערכות אבטחה, מכשירים מדויקים וכן הלאה.
יִתרוֹן
יחס מומנט-גודל גבוה:למרות גודלם הקומפקטי, מנועי צעד היברידיים בגודל 57 מ"מ יכולים לספק מומנט גבוה. זה הופך אותם למתאימים ליישומים בהם המקום מוגבל, אך נדרש מומנט גבוה.
בקרת לולאה פתוחה:מנועי צעד היברידיים יכולים לפעול במערכת בקרה בלולאה פתוחה, מה שאומר שהם אינם דורשים התקני משוב מיקום כגון מקודדים. זה מפשט את מערכת הבקרה ומפחית את העלויות הכוללות.
מיקום מדויק:מנועי צעד היברידיים מספקים יכולות מיקום מדויקות הודות לרזולוציית הצעדים הטבועה שלהם. הם יכולים לנוע במרווחים קטנים, מה שמאפשר מיקום מדויק וחזרתיות.
פעולה חלקה:מנועי צעד היברידיים יכולים להשיג פעולה חלקה, במיוחד כאשר הם מונעים בטכניקות מיקרו-צעד. מיקרו-צעד מחלק כל צעד לתת-צעדים קטנים יותר, וכתוצאה מכך תנועה חלקה יותר והפחתת רעידות.
זמן תגובה מהיר:למנועי צעד היברידיים יש זמני תגובה מהירים, המאפשרים האצה והאטה מהירות. תכונה זו מועילה עבור יישומים הדורשים תנועות דינמיות וזריזות.
אמינות ועמידות גבוהות:מנועי צעד היברידיים ידועים בחוסנם ובאמינותם. יש להם אורך חיים תפעולי ארוך, דרישות תחזוקה נמוכות ויכולים לעמוד בתנאי הפעלה קשים.
פתרון חסכוני:בהשוואה לטכנולוגיות בקרת תנועה אחרות כמו מנועי סרוו, מנועי צעד היברידיים מציעים בדרך כלל פתרון חסכוני יותר. הם מספקים איזון טוב בין ביצועים למחיר סביר.
אינטגרציה קלה:מנועי צעד היברידיים זמינים באופן נרחב ותואמים למערכות אלקטרוניות ובקרה שונות של הנעה. ניתן לשלב אותם בקלות בסוגים שונים של מכונות ומערכות אוטומציה.
יעילות אנרגטית:מנועי צעד היברידיים צורכים חשמל רק כשהם בתנועה, מה שהופך אותם לחסכוניים באנרגיה. כשהם נייחים, הם אינם דורשים חשמל רציף, מה שתורם לחיסכון כולל באנרגיה.
דרישות בחירת מנוע:
►כיוון תנועה/הרכבה
►דרישות טעינה
►דרישות שבץ
►דרישות עיבוד שבבי סופי
►דרישות דיוק
►דרישות משוב מקודד
►דרישות כוונון ידני
►דרישות סביבתיות
סדנת ייצור


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)