.jpg)
.jpg)
.jpg)
.jpg)
מנוע צעד היברידי Nema 34 (86 מ"מ), דו קוטבי, 4 מוליכים, בורג מוליך ACME, רעש נמוך, אורך חיים ארוך, לציוד רפואי
תֵאוּר
מנוע צעד היברידי זה בגודל 86 מ"מ זמין בשלושה סוגים: בעל הנעה חיצונית, ציר דרך וציר קבוע דרך. ניתן לבחור בהתאם לצרכים הספציפיים שלכם.
מנוע צעד של בורג מוליך ACME ממיר תנועה סיבובית לתנועה ליניארית, באמצעות בורג מוליך; לבורג המוליך יש שילובים שונים של קוטר ועופרת, כדי לענות על דרישות יישום שונות.
מנוע צעד עם בורג מוביל משמש בדרך כלל ביישומים הדורשים תנועה ליניארית מדויקת, רעש נמוך, עלות-תועלת גבוהה, כגון ציוד רפואי, מכשירי תקשורת וכו'.
חברת ThinkerMotion מציעה מגוון מלא של מנועי צעד מסוג בורג מוביל (NEMA 8, NEMA11, NEMA14, NEMA17, NEMA23, NEMA24, NEMA34) עם טווח עומסים מ-30N עד 2400N, וקיימים 3 סוגים (חיצוני, שבוי, לא שבוי). ניתן לעבד התאמות אישיות לפי בקשה, כגון אורך בורג וקצה בורג, בלם מגנטי, מקודד, אום נגד שחרור חוזר וכו'; וניתן גם לציפוי בורג המוביל בטפלון לפי בקשה.

תיאורים
| שם המוצר | מנועי צעד היברידיים 86 מ"מ |
| דֶגֶם | VSM86HSM |
| סוּג | מנועי צעד היברידיים |
| זווית צעד | 1.8° |
| מתח (V) | 3/4.8 |
| זרם (A) | 6 |
| התנגדות (אוהם) | 0.5/0.8 |
| השראות (mH) | 4/8.5 |
| חוטי עופרת | 4 |
| אורך מנוע (מ"מ) | 76/114 |
| טמפרטורת הסביבה | -20℃ ~ +50℃ |
| עליית הטמפרטורה | 80 אלף מקסימום |
| חוזק דיאלקטרי | 1mA מקסימום ב-500V, 1KHz, שנייה אחת |
| התנגדות בידוד | 100MΩ מינימום @500Vdc |
הסמכות

פרמטרים חשמליים:
| גודל מנוע | מֶתַח /שָׁלָב (ו) | נוֹכְחִי /שָׁלָב (א) | הִתנַגְדוּת /שָׁלָב (Ω) | הַשׁרָאוּת /שָׁלָב (מילי-הולכי רגל) | מספר חוטי עופרת | אינרציה של הרוטור (גרם לסמ"ר2) | משקל מנוע (ז) | אורך מנוע L (מ"מ) |
| 86 | 3 | 6 | 0.5 | 4 | 4 | 1300 | 2400 | 76 |
| 86 | 4.8 | 6 | 0.8 | 8.5 | 4 | 2500 | 5000 | 114 |
מפרט בורג עופרת ופרמטרי ביצועים
| קוֹטֶר (מ"מ) | עוֹפֶרֶת (מ"מ) | שָׁלָב (מ"מ) | כוח נעילה עצמית לכבות (נ) |
| 15.875 | 2.54 | 0.0127 | 2000 |
| 15.875 | 3.175 | 0.015875 | 1500 |
| 15.875 | 6.35 | 0.03175 | 200 |
| 15.875 | 12.7 | 0.0635 | 50 |
| 15.875 | 25.4 | 0.127 | 20 |
הערה: לקבלת מפרטים נוספים של בורגי מוביל, אנא צרו קשר.
שרטוט מתאר של מנוע חיצוני סטנדרטי VSM86HSM
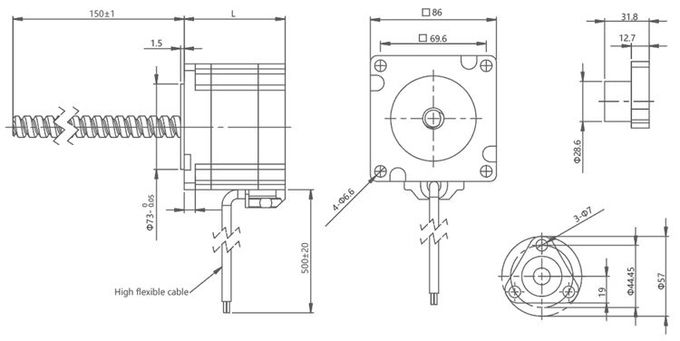
הערות:
ניתן להתאים אישית את אורך בורג ההובלה
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
שרטוט מתאר של מנועי צעד היברידיים בגודל 86 מ"מ:
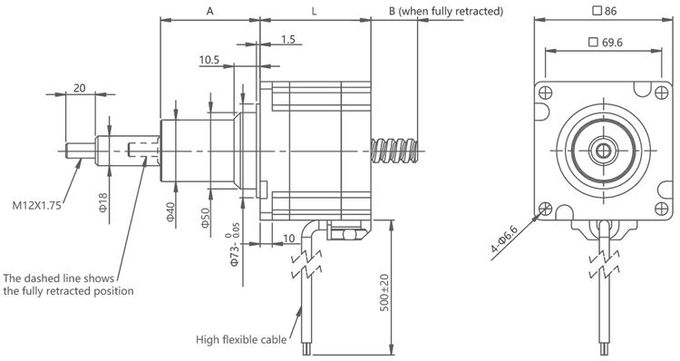
הערות:
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
| שבץ S (מ"מ) | ממד א' (מ"מ) | מידה B (מ"מ) | |
| ל = 76 | ל = 114 | ||
| 12.7 | 29.7 | 0 | 0 |
| 19.1 | 36.1 | 2.1 | 0 |
| 25.4 | 42.4 | 8.4 | 0 |
| 31.8 | 48.8 | 14.8 | 0 |
| 38.1 | 55.1 | 21.1 | 0 |
| 50.8 | 67.8 | 33.8 | 0 |
| 63.5 | 80.5 | 46.5 | 8.5 |
שרטוט מתאר של מנוע צעד היברידי סטנדרטי עם מנוע קבוע דרך 86 מ"מ
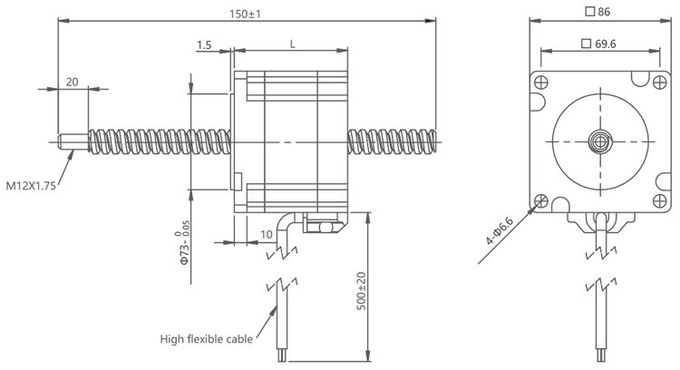
הערות:
ניתן להתאים אישית את אורך בורג ההובלה
עיבוד שבבי מותאם אישית אפשרי בקצה בורג ההובלה
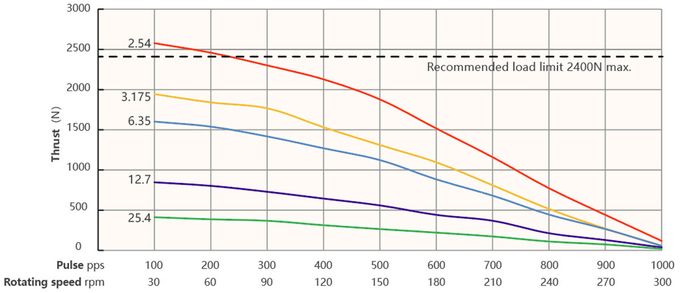
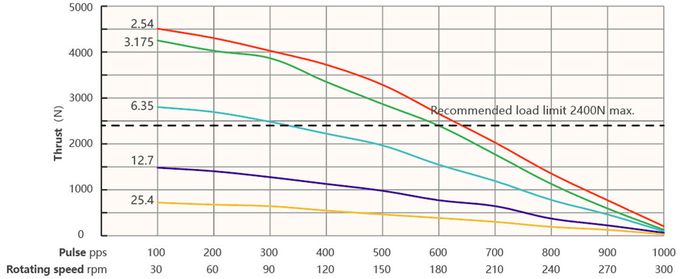
עקומת מהירות ודחף:
הנעת קוצץ דו קוטבית מסדרה 86 באורך מנוע 76 מ"מ
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ15.88 מ"מ)
הנעת קוצץ דו קוטבית מסדרה 86 באורך מנוע 114 מ"מ
עקומת דופק ותדר זרם דחף של 100% (בורג עופרת Φ15.88 מ"מ)
| עופרת (מ"מ) | מהירות ליניארית (מ"מ/שנייה) | |||||||||
| 2.54 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 | 12.7 |
| 3.175 | 1.5875 | 3.175 | 4.7625 | 6.35 | 7.9375 | 9.525 | 11.1125 | 12.7 | 14.2875 | 15.875 |
| 6.35 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 | 31.75 |
| 12.7 | 6.35 | 12.7 | 19.05 | 25.4 | 31.75 | 38.1 | 44.45 | 50.8 | 57.15 | 63.5 |
| 25.4 | 12.7 | 25.4 | 38.1 | 50.8 | 63.5 | 76.2 | 88.9 | 101.6 | 114.3 | 127 |
תנאי בדיקה:
הנעת קוצץ, ללא רמפה, חצי מיקרו-צעידה, מתח הנעה 40V
תחומי יישום
כלי עבודה של מכונות CNC:מנועי צעד היברידיים בגודל 86 מ"מ נמצאים בשימוש נרחב בכלי מכונות CNC לשליטה בתנועה ובמיקום של כלי חיתוך כדי לממש פעולות עיבוד שבבי בדיוק גבוה.
ציוד אוטומציה:ניתן להשתמש במנועי צעד היברידיים של 86 מ"מ במגוון ציוד אוטומציה, כגון מכונות אריזה אוטומטיות, מערכות מיון אוטומטיות, קווי ייצור אוטומטיים וכו', לשליטה בתנועה ובמיקום.
הדפסה תלת-ממדית:בתחום הדפסת התלת-ממד, מנועי צעד היברידיים בגודל 86 מ"מ משמשים לשליטה על המיקום והתנועה של ראש ההדפסה כדי לממש פעולות הדפסה מדויקות.
מכשירים רפואיים:מנועי צעד היברידיים בגודל 86 מ"מ נמצאים בשימוש נרחב במכשירים רפואיים, כגון משאבות מזרק רפואיות, רובוטים רפואיים, ציוד סריקה רפואי וכו' לבקרת מיקום ובקרת תנועה מדויקת.
ציוד תקשורת:מנועי צעד היברידיים בגודל 86 מ"מ יכולים לשמש למיקום ובקרה מדויקים בציוד טלקומוניקציה, כגון מערכת מיקום של אנטנות תקשורת, בקרה מדויקת של ציוד סיבים אופטיים.
מכונות טקסטיל:בתעשיית הטקסטיל, ניתן להשתמש במנועי צעד היברידיים של 86 מ"מ כדי לשלוט במכונות טוויה, נולים וציוד אחר כדי להבטיח את הדיוק והיציבות של תהליך הטקסטיל.
רובוטיקה:ניתן להשתמש במנועי צעד היברידיים בגודל 86 מ"מ במגוון יישומי רובוטיקה, כולל רובוטים תעשייתיים, רובוטי שירות, רובוטים שיתופיים וכו', לתנועה ותפעול מדויקים.
מערכות אחסון אוטומטיות:במערכות אוטומטיות של אחסון ולוגיסטיקה, ניתן להשתמש במנועי צעד היברידיים של 86 מ"מ כדי לשלוט על מסועים, מעליות, מערימות וציוד אחר כדי להשיג מיקום וטיפול מדויקים בפריטים.
יִתרוֹן
תנועה חלקה ומדויקת:מנועי צעד היברידיים בגודל 86 מ"מ יכולים להשיג תנועה חלקה ומדויקת הודות לרזולוציית הצעדים הטבועה שלהם. זה מאפשר מיקום מדויק ותנועה חלקה, תוך הפחתת הסיכון לרעידות והבטחת ביצועים באיכות גבוהה.
מומנט גבוה במהירויות נמוכות:מנועי צעד היברידיים מספקים תפוקת מומנט גבוהה אפילו במהירויות נמוכות, מה שהופך אותם למתאימים ליישומים הדורשים מומנט אחיזה או התנעה חזק. מאפיין זה יתרון במיוחד במצבים בהם המנוע צריך לשמור על מיקום כנגד כוחות חיצוניים.
מגוון רחב של רזולוציות צעד:מנועי צעד היברידיים בגודל 86 מ"מ מציעים מגוון רחב של רזולוציות צעד, המאפשרות שליטה עדינה בתנועה. באמצעות טכניקות מיקרו-צעד, המנוע יכול לחלק כל צעד לתת-צעדים קטנים יותר, וכתוצאה מכך תנועה חלקה יותר ודיוק מיקום משופר.
קל להנעה ובקרה: למנועי צעד היברידיים יש ארכיטקטורת הנעה ובקרה פשוטה, בדרך כלל באמצעות אותות פולסים וכיוון. זה מקל על שילובם במערכות בקרה שונות, מה שמפחית את המורכבות וזמן הפיתוח.
אמינות ועמידות גבוהות:מנועי צעד היברידיים בקוטר 86 מ"מ ידועים בחוסנם ובאורך החיים התפעולי הארוך שלהם. הם יכולים לעמוד בתנאי הפעלה תובעניים, כגון שינויי טמפרטורה ועומסים מכניים, מבלי לפגוע בביצועים.
פתרון חסכוני:מנועי צעד היברידיים מציעים פתרון חסכוני בהשוואה לטכנולוגיות בקרת תנועה אחרות, כגון מנועי סרוו. הם מספקים איזון טוב בין ביצועים לעלות, מה שהופך אותם למתאימים ליישומים בהם שיקולי תקציב חשובים.
יישומים רב-תכליתיים:מנועי צעד היברידיים בגודל 86 מ"מ נמצאים ביישומים בתעשיות שונות, כולל רובוטיקה, אוטומציה, ייצור, הדפסה תלת-ממדית, ציוד רפואי ועוד. הרבגוניות שלהם מאפשרת להם לשמש במגוון רחב של יישומים הדורשים מיקום ובקרה מדויקים.
דרישות בחירת מנוע:
►כיוון תנועה/הרכבה
►דרישות טעינה
►דרישות שבץ
►דרישות עיבוד שבבי סופי
►דרישות דיוק
►דרישות משוב מקודד
►דרישות כוונון ידני
►דרישות סביבתיות
סדנת ייצור


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)