1. מה זהמנוע צעד?
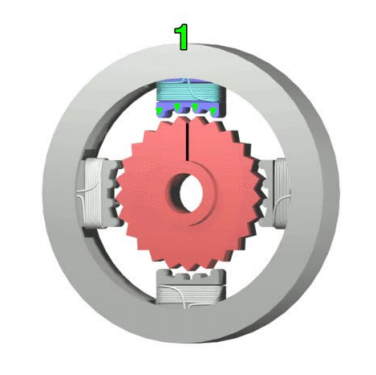
מנועי צעד נעים בצורה שונה ממנועים אחרים. מנועי צעד DC משתמשים בתנועה לא רציפה. ישנן מספר קבוצות סלילים בגופם, הנקראות "פאזות", אותן ניתן לסובב על ידי הפעלת כל פאזה ברצף. צעד אחד בכל פעם.
על ידי שליטה במנוע הצעדים דרך הבקר/מחשב, ניתן למקם אותו במדויק ובמהירות מדויקת. בשל יתרון זה, מנועי צעד נמצאים בשימוש נרחב בציוד הדורש תנועה מדויקת.
למנועי צעד מגיעים במגוון גדלים, צורות ועיצובים. מאמר זה יסביר באופן ספציפי כיצד לבחור מנוע צעד בהתאם לצרכים שלכם.

2. מהם היתרונות שלמנועי צעד?
א. מיצובמכיוון שתנועת מנועי צעד מדויקת וחוזרת על עצמה, ניתן להשתמש בהם במגוון מוצרים הנשלטים במדויק, כגון הדפסה תלת-ממדית, CNC, פלטפורמת מצלמה וכו'. ישנם כוננים קשיחים המשתמשים גם במנוע צעד למיקום ראש הקריאה.
ב. בקרת מהירות- צעדים מדויקים גם מאפשרים שליטה מדויקת במהירות הסיבוב, מתאים לביצוע פעולות מדויקות או בקרת רובוט
ג. מהירות נמוכה ומומנט גבוהבאופן כללי, למנועי DC יש מומנט נמוך במהירויות נמוכות. אבל למנועי צעד יש מומנט מקסימלי במהירויות נמוכות, ולכן הם בחירה טובה עבור יישומים בעלי מהירות נמוכה ודיוק גבוה.
3. חסרונות שלמנוע צעד :
א. חוסר יעילות- בניגוד למנועי DC, צריכת מנועי צעד אינה קשורה הרבה לעומס. כאשר הם אינם מבצעים עבודה, עדיין יש זרם, כך שבדרך כלל יש להם בעיות התחממות יתר, והיעילות נמוכה יותר.
ב. מומנט במהירות גבוהה- בדרך כלל מומנט מנוע הצעדים במהירות גבוהה נמוך יותר מאשר במהירות נמוכה, חלק מהמנועים עדיין יכולים להשיג ביצועים טובים יותר במהירות גבוהה, אך הדבר דורש הנעה טובה יותר כדי להשיג אפקט זה.
ג. לא ניתן לנטרמנועי צעד רגילים אינם יכולים לתת משוב/לזהות את המיקום הנוכחי של המנוע, אנו קוראים לזה "לולאה פתוחה". אם אתם זקוקים לבקרת "לולאה סגורה", עליכם להתקין מקודד ודרייבר, כך שתוכלו לנטר/לשלוט בסיבוב המדויק של המנוע בכל עת, אך העלות גבוהה מאוד והיא אינה מתאימה למוצרים רגילים.
שלב מנוע צעד
4. סיווג של דריכה:
ישנם סוגים רבים של מנועי צעד, המתאימים למצבים שונים.
עם זאת, בנסיבות רגילות, מנועי PM ומנועי צעד היברידיים משמשים בדרך כלל מבלי להתחשב במנועי שרת פרטי.
5. גודל מנוע:
השיקול הראשון בבחירת מנוע הוא גודלו. מנועי צעד נעים בין מנועים מיניאטוריים של 4 מ"מ (המשמשים לשליטה בתנועת מצלמות בסמארטפונים) ועד ענקים כמו NEMA 57.
למנוע יש מומנט עבודה, מומנט זה קובע אם הוא יכול לעמוד בדרישתך להספק המנוע.
לדוגמה: NEMA17 משמש בדרך כלל במדפסות תלת-ממד ובציוד CNC קטן, ומנועי NEMA גדולים יותר משמשים בייצור תעשייתי.
NEMA17 מתייחס כאן לקוטר החיצוני של המנוע שהוא 17 אינץ', שהוא גודל מערכת האינץ', שהיא 43 ס"מ כאשר מומר לסנטימטרים.
בסין, אנו משתמשים בדרך כלל בסנטימטרים ומילימטרים כדי למדוד מידות, ולא באינצ'ים.
6. מספר צעדי המנוע:
מספר הצעדים לכל סיבוב מנוע קובע את הרזולוציה והדיוק שלו. למנועי צעד יש צעדים מ-4 עד 400 לכל סיבוב. בדרך כלל משתמשים ב-24, 48 ו-200 צעדים.
דיוק מתואר בדרך כלל כמעלה של כל צעד. לדוגמה, הצעד של מנוע בעל 48 צעדים הוא 7.5 מעלות.
עם זאת, החסרונות של דיוק גבוה הם מהירות ומומנט. באותה תדר, מהירותם של מנועים בעלי דיוק גבוה נמוכה יותר.

7. תיבת הילוכים:
דרך נוספת לשיפור הדיוק והמומנט היא שימוש בתיבת הילוכים.
לדוגמה, תיבת הילוכים ביחס של 32:1 יכולה להמיר מנוע בעל 8 שלבים למנוע מדויק בעל 256 שלבים, תוך הגדלת המומנט פי 8.
אבל מהירות הפלט תופחת בהתאם לשמינית מהמקור.
מנוע קטן יכול גם להשיג את האפקט של מומנט גבוה דרך תיבת ההילוכים להפחתה.
8. פיר:
הדבר האחרון שצריך לקחת בחשבון הוא כיצד להתאים את ציר ההינע של המנוע וכיצד להתאים את מערכת ההינע שלכם.
סוגי הפירים הם:
ציר עגול / ציר D: סוג זה של ציר הוא ציר המוצא הסטנדרטי ביותר, המשמש לחיבור גלגלות, מערכות גלגלי שיניים וכו'. ציר ה-D מתאים יותר למומנט גבוה כדי למנוע החלקה.
ציר גלגל שיניים: ציר המוצא של חלק מהמנועים הוא גלגל שיניים, המשמש להתאמה למערכת גלגל שיניים ספציפית.
ציר בורג: מנוע עם ציר בורג משמש לבניית מפעיל ליניארי, וניתן להוסיף מחוון כדי להשיג בקרה ליניארית.
אל תהססו לפנות אלינו אם אתם מעוניינים באחד ממנועי הצעד שלנו.
זמן פרסום: 29 בינואר 2022