לולאה סגורהמנועי צעדשינו את יחס הביצועים-עלות ביישומי בקרת תנועה רבים. הצלחתם של מנועי VIC בלולאה סגורה פרוגרסיביים פתחה גם את האפשרות להחליף מנועי סרוו יקרים במנועי סרוו בעלות נמוכה.מנועי צעדבמספר הולך וגדל של יישומי אוטומציה תעשייתית בסטנדרטים גבוהים, התקדמות טכנולוגית משנה את יחס הביצועים-עלות בין מנועי צעד למנועי סרוו.
מנועי צעד לעומת מנועי סרוו
על פי החוכמה המקובלת, מערכות בקרת סרוו מתפקדות טוב יותר ביישומים בהם נדרשות מהירויות מעל 800 סל"ד ותגובה דינמית גבוהה. מנועי צעד מתאימים יותר ליישומים עם מהירויות נמוכות יותר, תאוצה נמוכה עד בינונית ומומנט החזקה גבוה.
אז מהו הבסיס לחוכמה המקובלת הזו לגבי מנועי צעד ומנועי סרוו? בואו ננתח אותה ביתר פירוט בהמשך.
1. פשטות ועלות
מנועי צעד אינם רק זולים יותר ממנועי סרוו, הם גם קלים יותר להפעלה ולתחזוקה. מנועי צעד יציבים בעמידה ושומרים על מקומם (אפילו עם עומסים דינמיים). עם זאת, אם נדרשים ביצועים גבוהים יותר עבור יישומים מסוימים, יש להשתמש במנועי סרוו יקרים ומורכבים יותר.
2. מבנה
מנועי צעדלסובב בצורה הדרגתית, באמצעות סלילים מגנטיים כדי למשוך בהדרגה מגנט ממיקום אחד למשנהו. כדי להזיז את המנוע 100 מיקומים בכל כיוון, המעגל דורש ביצוע 100 פעולות צעד על המנוע. מנועי צעד משתמשים בפולסים כדי להשיג תנועות מצטברות, מה שמאפשר מיקום מדויק ללא שימוש בחיישני משוב.
שיטת התנועה של מנוע הסרוו שונה. הוא מחבר חיישן מיקום - כלומר מקודד - לרוטור המגנטי ומזהה באופן רציף את המיקום המדויק של המנוע. הסרוו עוקב אחר ההפרש בין המיקום בפועל של המנוע למיקום שנקבע ומתאים את הזרם בהתאם. מערכת לולאה סגורה זו שומרת על המנוע במצב תנועה נכון.

3. מהירות ומומנט
ההבדל בביצועים בין מנועי צעד למנועי סרוו נובע מפתרונות עיצוב המנוע השונים שלהם.מנועי צעדיש מספר גדול בהרבה של קטבים מאשר מנועי סרוו, כך שסיבוב מלא של מנוע צעד דורש חילופי זרם רבים יותר של סלילים, וכתוצאה מכך לירידה מהירה במומנט במהירויות עולות. בנוסף, אם מושג המומנט המרבי, מנוע הצעד עלול לאבד את פונקציית סנכרון המהירות שלו. מסיבות אלה, מנועי סרוו הם הפתרון המועדף ברוב היישומים במהירות גבוהה. לעומת זאת, מספר הקטבים הגבוה יותר של מנוע צעד הוא יתרון במהירויות נמוכות יותר, כאשר למנוע הצעד יש יתרון מומנט על פני מנוע סרוו באותו גודל.
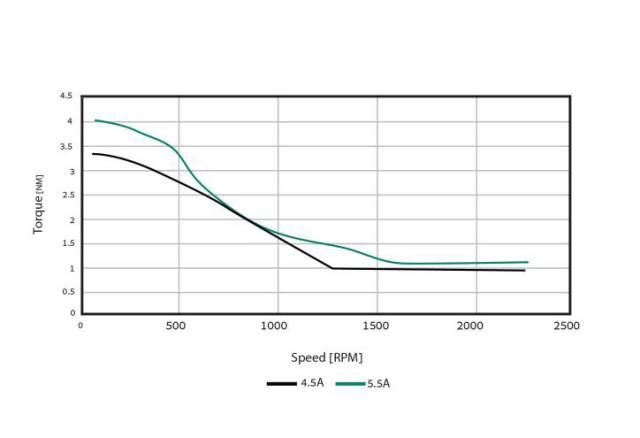
ככל שהמהירות עולה, מומנט מנוע הצעדים יורד
4. מיקום
ישנם הבדלים חשובים בין מנועי צעד למנועי סרוו ביישומים שבהם יש לדעת את המיקום המדויק של המכונה בכל עת. ביישומי תנועה בלולאה פתוחה הנשלטים על ידי מנועי צעד, מערכת הבקרה מניחה שהמנוע תמיד נמצא במצב תנועה נכון. עם זאת, לאחר שנתקלת בבעיה, כגון מנוע שנתקע עקב רכיב תקוע, הבקר אינו מסוגל לדעת את המיקום האמיתי של המכונה, מה שעלול להוביל לאובדן מיקום. למערכת בלולאה סגורה של מנוע הסרוו עצמו יש יתרון: אם הוא נתקע על ידי עצם, הוא יזהה זאת מיד. המכונה תפסיק לפעול ולעולם לא תצא ממקומה.
5. צריכת חום ואנרגיה
מנועי צעד בלולאה פתוחה משתמשים בזרם קבוע ופולטים הרבה חום. בקרת בלולאה סגורה מספקת רק את הזרם הנדרש ללולאת המהירות ולכן נמנעת מבעיית חימום המנוע.
סיכום השוואה
מערכות בקרת סרוו מתאימות ביותר ליישומים במהירות גבוהה הכוללים שינויי עומס דינמיים, כגון זרועות רובוטיות. מערכות בקרת צעד, לעומת זאת, מתאימות יותר ליישומים הדורשים תאוצה נמוכה עד בינונית ומומנט החזקה גבוה, כגון מדפסות תלת מימד, מסועים, צירים משנה וכו'. מכיוון שמנועי צעד זולים יותר, הם יכולים להפחית את עלות מערכות האוטומציה בעת השימוש. מערכות בקרת תנועה שצריכות לנצל את המאפיינים של מנועי סרוו יצטרכו להוכיח שמנועים יקרים יותר אלה שווים את משקלם בזהב.
מנועי צעד עם בקרת לולאה סגורה
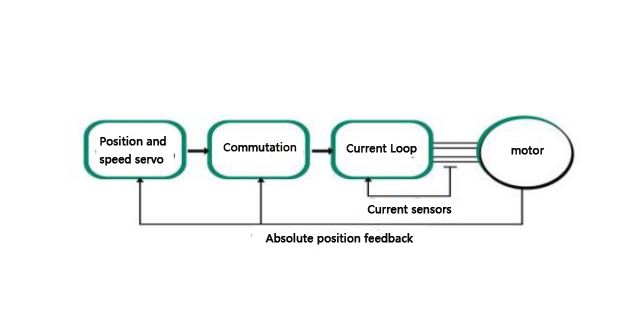
מנוע צעד עם בקרה אלקטרונית משולבת הוא שווה ערך למנוע DC דו-פאזי ללא מברשות ויכול לבצע בקרת לולאת מיקום, בקרת לולאת מהירות, בקרת DQ ואלגוריתמים אחרים. מקודד מוחלט בעל סיבוב אחד משמש לקומוטציה בלולאה סגורה, ובכך מבטיח מומנט אופטימלי בכל מהירות.
צריכת אנרגיה נמוכה ושמירה על קרירות
מנועי צעד VIC חסכוניים ביותר באנרגיה. בניגוד למנועי צעד בלולאה פתוחה, שתמיד פועלים על פיקוד זרם מלא וגורמים לבעיות חום ורעש, הזרם משתנה בהתאם לתנאי התנועה בפועל, למשל במהלך האצה והאטה. בדומה למנועי סרוו, הזרם הנצרך על ידי מנועי צעד אלה בכל רגע נתון הוא פרופורציונלי למומנט הנדרש בפועל. מכיוון שהמנוע ולוח הבקרה האלקטרוני המשולב פועלים בצורה קרירה יותר, מנועי צעד VIC יכולים להשיג מומנט שיא גבוה יותר בהשוואה למנועי סרוו.
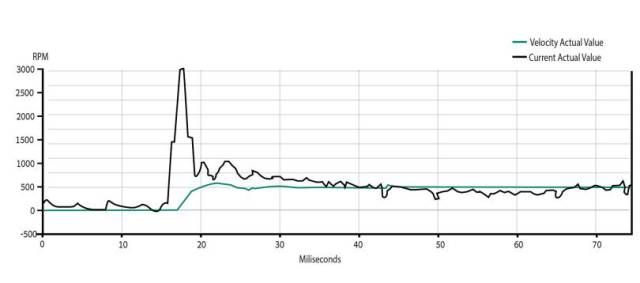
אפילו במהירויות גבוהות, מנועי צעד VIC דורשים פחות זרם
מונעים על ידי התקדמות בטכנולוגיית לולאה סגורה, מנועי צעד מסוגלים לחדור ליישומים בעלי ביצועים גבוהים ומהירות גבוהה שבעבר היו שייכים אך ורק למנועי סרוו.
מנועי צעד עם טכנולוגיית לולאה סגורה
מה אם ניתן היה ליישם את היתרונות של טכנולוגיית סרוו בלולאה סגורה על מנועי צעד?
האם נוכל להשיג ביצועים דומים למנועי סרוו ועדיין לממש את יתרונות העלות של מנועי צעד?
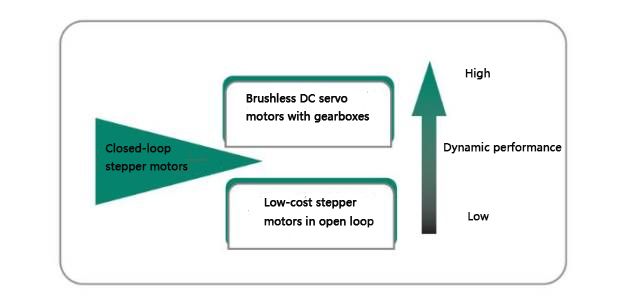
על ידי שילוב טכנולוגיית בקרה בלולאה סגורה, מנוע הצעד יהפוך למוצר מקיף עם היתרונות של מנועי סרוו ומנועי צעד כאחד, בעלות נמוכה. מכיוון שמנועי צעד בלולאה סגורה מציעים שיפורים משמעותיים בביצועים וביעילות אנרגטית, הם יכולים להחליף מנועי סרוו יקרים יותר במספר הולך וגדל של יישומים בסטנדרטים גבוהים.
להלן דוגמה למנוע צעד משולב VIC עם בקרת לולאה סגורה משובצת כדי להסביר את הביצועים, היתרונות והחסרונות של מנועי צעד בטכנולוגיית לולאה סגורה.
דרישות ביצועים תואמות במדויק
על מנת להבטיח מומנט מספיק כדי להתגבר על הפרעות ולמנוע אובדן צעדים, מנועי צעד בלולאה פתוחה בדרך כלל צריכים להבטיח שהמומנט גבוה בלפחות 40% מהערך הנדרש על ידי היישום. למנועי צעד בלולאה סגורה כיום אין בעיה זו. כאשר מנועי צעד אלה נתקעים עקב עומס יתר, הם ימשיכו להחזיק את העומס מבלי לאבד מומנט. הם ימשיכו לפעול לאחר הסרת מצב עומס היתר. ניתן להבטיח מומנט מקסימלי בכל מהירות נתונה וחיישן המיקום מבטיח שלא יהיה אובדן צעדים. לכן ניתן להגדיר מנועי צעד בלולאה סגורה כך שיתאימו בדיוק לדרישות המומנט של היישום הרלוונטי ללא צורך במרווח נוסף של 40%.
עם מנועי צעד בלולאה פתוחה, קשה לעמוד בדרישות מומנט רגעי גבוהות עקב הסיכון לאובדן צעדים. בהשוואה למנועי צעד קונבנציונליים, מנועי צעד בלולאה סגורה מסוג VIC יכולים להשיג תאוצה מהירה מאוד, רעש תפעולי נמוך ותהודה נמוכה. הם יכולים לפעול ברוחב פס גבוה בהרבה ולהשיג ביצועים מצוינים.
אין ארון
טודה משלבת את לוח בקרת ההינע עם המנוע, מה שמפחית את כמות החיווט ומפשט את פתרון היישום. בעזרת טודה, ניתן לבנות מכונות ללא ארונות.
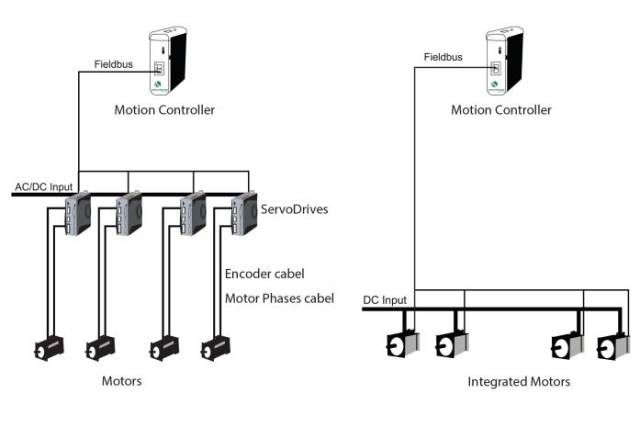
שילוב אלקטרוניקה עם מנועי צעד מפחית את המורכבות
בעזרת טכנולוגיית לולאה סגורה, מנועי צעד בלולאה סגורה מציעים למשתמשים דיוק ויעילות מעולים, עם הביצועים של מנוע סרוו והעלות הנמוכה של מנוע צעד. מנועי צעד זולים יותר חודרים בהדרגה ליישומים שאחרת היו נשלטים על ידי מנועי סרוו יקרים.
זמן פרסום: 10 באפריל 2023