מנוע צעד הוא מנוע חשמלי הממיר אנרגיה חשמלית לאנרגיה מכנית, וניתן לשלוט במדויק על מומנט המוצא והמהירות שלו על ידי שליטה באספקת החשמל.
אני, היתרונות של מנוע צעד
דיוק גבוה
זווית הסיבוב של מנוע הצעדים פרופורציונלית למספר פעימות הקלט, כך שניתן לשלוט במדויק במספר ובתדירות הפעימות כדי להשיג שליטה מדויקת במיקום המנוע ובמהירותו. מאפיין זה הופך את מנועי הצעדים למצוינים ביישומים הדורשים מיקום מדויק, כגון מכונות CNC, מכונות דפוס ומכונות טקסטיל.
למנועי צעד בדרך כלל יש דיוק של בין 3% ל-5% לכל צעד והם אינם צוברים את השגיאה מהצעד הקודם לבא אחריו, כלומר הם אינם מייצרים שגיאות מצטברות. משמעות הדבר היא שמנועי צעד מסוגלים לשמור על דיוק מיקום גבוה וחזרתיות תנועה לאורך תקופות זמן ארוכות או תנועה רציפה.
ניתן לשליטה רבה

פעולת מנוע צעד מושגת על ידי שליטה בזרם הפולס, כך שניתן לממש שליטה במנוע באמצעות תכנות תוכנה. יכולת תכנות זו מאפשרת למנועי צעד לענות על הצרכים של מגוון רחב של יישומים, כגון קווי ייצור אוטומטיים, רובוטיקה ותחומים אחרים.
מכיוון שתגובת מנוע הצעדים נקבעת רק על ידי פולס הקלט, ניתן להשתמש בבקרת לולאה פתוחה, מה שהופך את מבנה המנוע לפשוט וזול יותר לשליטה. בקרת לולאה פתוחה גם מפחיתה את מורכבות המערכת ואת עלויות התחזוקה.
מומנט גבוה במהירויות נמוכות
למנועי צעד יש תפוקת מומנט גבוהה במהירויות נמוכות, מה שהופך אותם למצוינים ביישומים הדורשים מהירות נמוכה ומומנט גבוה, כגון מכונות תיוג אוטומטיות ומכונות אריזה.
למנועי צעד יש מומנט מקסימלי כאשר הם נעצרים, תכונה שהופכת אותם ליתרון ביישומים בהם נדרשת יציבות מיקום או התנגדות לעומסים חיצוניים.
אמינות גבוהה

למנועי צעד אין מברשות, ובכך מפחיתים תקלות ורעש עקב שחיקה של מברשות. זה הופך את מנועי הצעד לאמינים ביותר, כאשר חיי המנוע תלויים במידה רבה בחיי המיסבים.
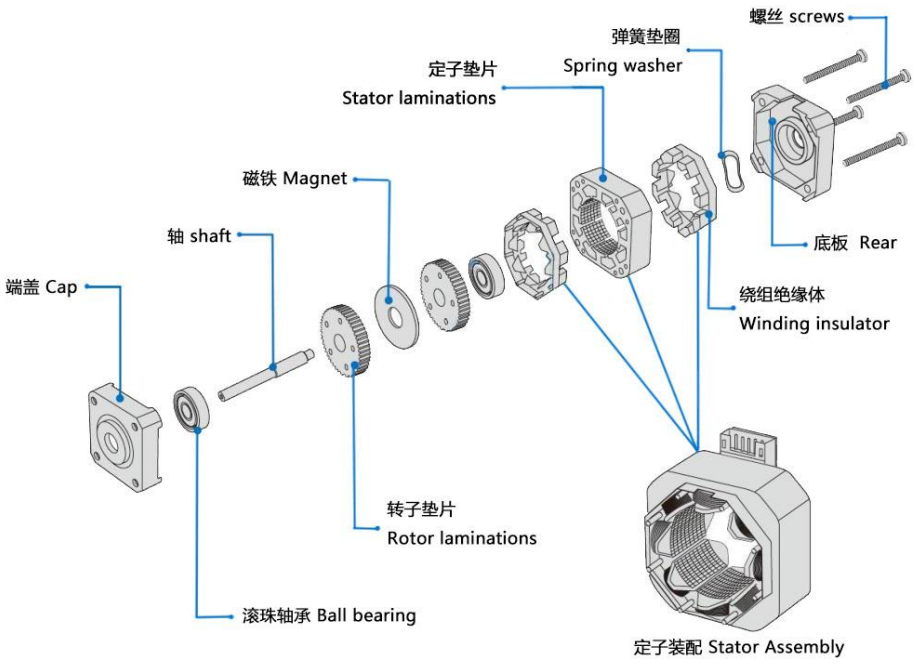
למנועי צעד מבנה פשוט, המורכב משלושה חלקים: המנוע עצמו, הדרייבר והבקר, מה שהופך את ההתקנה והתחזוקה לקלים יחסית.
טווח מהירויות רחב

למנועי צעד יש טווח מהירויות מהיר יחסית, וניתן לשנות את מהירות המנוע על ידי התאמת תדר הפולסים. זה מאפשר למנוע הצעד להסתגל למהירויות עבודה שונות ולדרישות עומס.
תגובה טובה להתחלה-עצירה ולתגובה לאחור
מנועי צעד מגיבים במהירות לאותות בקרה בעת התנעה ועצירה, ושומרים על דיוק ויציבות גבוהים בעת היפוך. תכונה זו הופכת את מנוע הצעד ליתרון בעת הצורך בהתנעה-עצירה והיפוך תכופים של היישום.
II, החסרונות של מנועי צעד
קל לאבד צעד או לחרוג מהדרגה
אם מנועי צעד אינם מבוקרים כראוי, הם רגישים ליציאה מהסטייה או ליציאה מהסטייה. יציאה מהסטייה פירושה שהמנוע אינו מסתובב בהתאם למספר צעדים קבוע מראש, בעוד שיציאה מהסטייה פירושה שהמנוע מסתובב יותר ממספר צעדים קבוע מראש. שתי התופעות הללו גורמות לאובדן דיוק המיקום של המנוע ומשפיעות על ביצועי המערכת.
יצירת חוסר צעד וחריגה קשורה לגורמים כגון עומס המנוע, מהירות הסיבוב, ותדירות ואמפליטודה של אות הבקרה. לכן, בעת שימוש במנועי צעד, יש לשקול גורמים אלה בקפידה ולנקוט באמצעים מתאימים כדי למנוע התרחשות של חוסר צעד וחריגה.
קושי להגיע למהירויות סיבוב גבוהות
מהירות הסיבוב של מנוע צעד מוגבלת על ידי עקרון הפעולה שלו, ובדרך כלל קשה להשיג מהירות סיבוב גבוהה. למרות שניתן להגביר את מהירות המנוע על ידי הגברת תדירות אות הבקרה, תדר גבוה מדי יוביל לבעיות כגון התחממות המנוע, רעש מוגבר ואף עלול לגרום נזק למנוע.
לכן, בעת שימוש במנועי צעד, יש צורך לבחור את טווח המהירות המתאים בהתאם לדרישות היישום ולהימנע מהפעלה במהירויות גבוהות למשך פרקי זמן ארוכים.
רגיש לשינויי עומס
מנועי צעד דורשים בקרה בזמן אמת על מספר ותדירות פעימות הזרם במהלך הפעולה כדי להבטיח בקרה מדויקת על המיקום והמהירות. עם זאת, במקרה של שינויים גדולים בעומס, פעימת זרם הבקרה תופרע, וכתוצאה מכך תנועה לא יציבה ואף צעידה בלתי מבוקרת.
כדי לפתור בעיה זו, ניתן להשתמש במערכת בקרה בלולאה סגורה כדי לנטר את מיקום ומהירות המנוע ולהתאים את אות הבקרה בהתאם למצב בפועל. עם זאת, הדבר יגדיל את מורכבות המערכת ואת עלותה.
יעילות נמוכה
מכיוון שמנועי צעד נשלטים בין עצירה והפעלה קבועים, יעילותם נמוכה יחסית בהשוואה לסוגים אחרים של מנועים (למשל מנועי DC, מנועי AC וכו'). משמעות הדבר היא שמנועי צעד צורכים יותר חשמל עבור אותו הספק פלט.
על מנת לשפר את יעילותם של מנועי צעד, ניתן להשתמש באמצעים כגון אופטימיזציה של אלגוריתמי בקרה והפחתת הפסדי מנוע. עם זאת, יישום אמצעים אלה דורש רמה מסוימת של טכנולוגיה והשקעה בעלויות.
ג', היקף היישום של מנועי צעד:
מנועי צעד נמצאים בשימוש נרחב בתחומים רבים בשל יתרונותיהם הייחודיים ומגבלותיהם. להלן דיון מפורט על היקף היישום של מנועי צעד:
מערכות רובוטיקה ואוטומציה
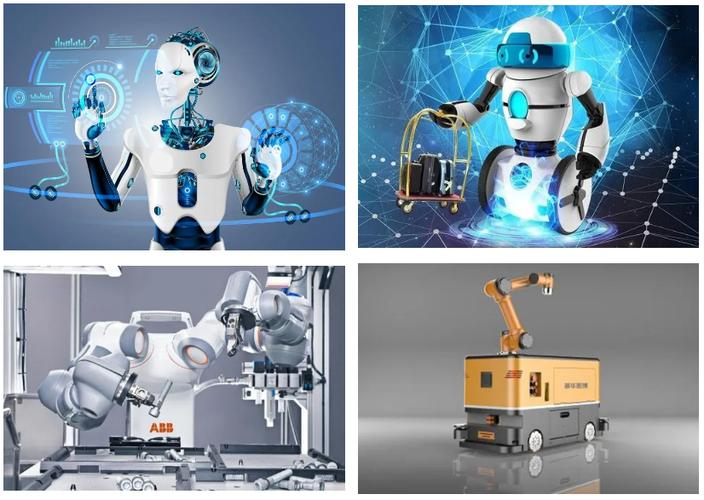
מנועי צעד נמצאים בשימוש נרחב ברובוטים תעשייתיים, קווי ייצור אוטומטיים ותחומים אחרים. הם יכולים לשלוט במדויק במהירות ובכיוון התנועה של רובוטים ולהשיג מיקום מדויק ותגובה מהירה בתהליכי ייצור אוטומטיים.
כלי עבודה של מכונות CNC

מדפסות

מנועי צעד משמשים לשליטה בתנועת ראש ההדפסה במכשירים כגון מדפסות הזרקת דיו ומדפסות לייזר. על ידי שליטה מדויקת בתנועת המנוע, ניתן להשיג הדפסת טקסט ותמונה באיכות גבוהה. תכונה זו הופכת מנועי צעד לשימוש נרחב בציוד הדפסה.
מכשירים רפואיים

מנועי צעד משמשים בציוד הדמיה רפואי (למשל, מכשירי רנטגן, סורקי CT וכו') כדי להניע את תנועת מסגרת הסריקה. על ידי שליטה מדויקת בתנועת המנוע, ניתן להשיג הדמיה מהירה ומדויקת של המטופל. תכונה זו הופכת את מנועי הצעד למלא תפקיד חשוב בציוד רפואי.
תעופה וחלל

מנועי צעד משמשים לשליטה בתנועת מפעילים בציוד חלל כגון בקרת כיוון לוויינים ומערכות הנעה רקטיות. מנועי צעד מציגים ביצועים טובים תחת דרישות דיוק גבוה ויציבות גבוהה. מאפיין זה הופך את מנועי הצעד לחלק חשוב בתחום החלל.
ציוד בידור ומשחקים

מנועי צעד משמשים לשליטה בתנועת מפעילים במכשירים כגון חרטי לייזר, מדפסות תלת-ממד ובקרי משחקים. במכשירים אלה, שליטה מדויקת במנועי צעד היא קריטית להשגת מוצר איכותי וחוויית משתמש מעולה.
חינוך ומחקר

מנועי צעד משמשים לשליטה בתנועת פלטפורמות ניסיוניות בתרחישים כגון מכשירי מעבדה וציוד הוראה. בחינוך, העלות הנמוכה והדיוק הגבוה של מנועי צעד הופכים אותם לכלי הוראה אידיאליים. על ידי ניצול מאפייני הבקרה המדויקים של מנועי צעד, הם יכולים לעזור לתלמידים להבין טוב יותר עקרונות פיזיקה והנדסה.
לסיכום, למנועי צעד יש יתרונות של דיוק גבוה, בקרה, מהירות נמוכה ומומנט גבוה ואמינות גבוהה, אך יש להם גם חסרונות של יציאה קלה או חוסר התאמה, קושי בהשגת מהירויות סיבוב גבוהות, רגישות לשינויי עומס ויעילות נמוכה. בבחירת מנועי צעד, יש לשקול את היתרונות והחסרונות שלהם וכן את היקף היישום בהתאם לדרישות היישום כדי להבטיח את ביצועי המערכת ויציבותה.
זמן פרסום: 14 בנובמבר 2024